Let me start with special thanks to @pacificmeister and @Hiorth for inspiring me to start a build back in 2018.
Ok first things first: Direct drive Efoil is HARD!
So I decided to share my story and hope it will help somebody avoid my mistakes or maybe inspire some new ideas.
I will be making separate posts about: 1) Board 2) Wing 3) Prop 4) ESC 5) Motor
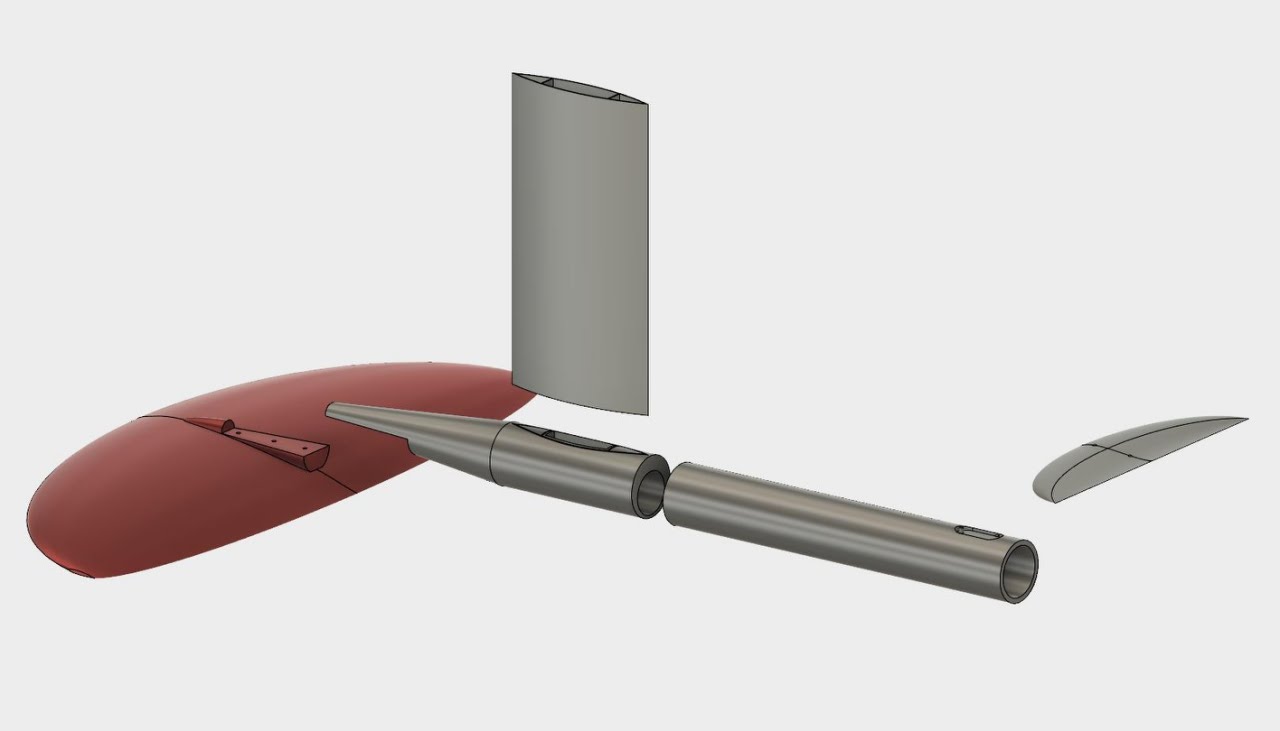
I decided to split the battery compartment and the electronics compartment. The small electronics compartment is closer to the nose of the board for better remote signal. The battery compartment is closer to the back (to shift weight backwards) and has an aluminum bottom for passive cooling, with doubles as a mast fixing plate:
After several month of learning Fusion 360 and Autodesk CFD. I managed to come up with this wing model. The CFD simulations show 1:10 lift ratio @ about 20 kph speed with 5° AOA. Never got to properly test it thou(first thing to do in sommer 2020).
I’m starting to shape a board with XPS now. Learning what works, and what does not. What tool did you use to mill out the shallow recess where your big aluminium plate will sit. It looks like it came out nice. How many coats of glass, and what weight glass? I’m looking forward to seeing your motor solution.
Hi MAC, I would suggest using a hot wire to cut off the large pieces, then a polishing machine(same as an angle grinder but with low RPM) and finally a delta sanding tool. Something like this:
I used only one coat of glass because high density EPS 200 so I suggest using the highest density XPS you can get. Same with glass - get the thickest you can.
You will have to do several epoxy coats to achieve a smooth finish. I would recommend adding color pigments into epoxy to achieve a base color(something I am planning to do on my next board).
This mistake led me on a journey of a lot of pain and knowledge as I spent the whole 2018 summer trying to make it spin under water. More on that in my ESC post!
Then the smaller props arrived and the testing went much better.
I will write more on that in my ESC and Motor sections.
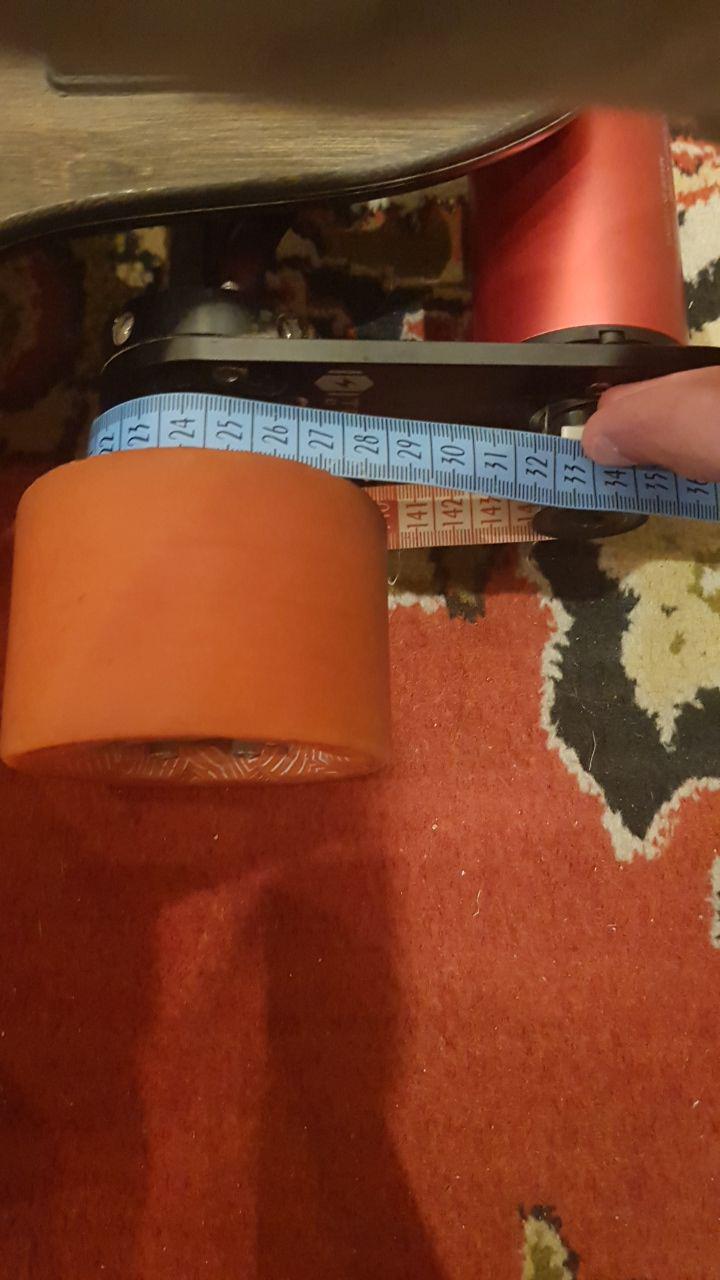
For now the prop is still an unsolved issue. The best results so far were achieved with this small 2 blade prop from Aliexpress:
Hi Konstantin,
you did a great job finding the 2 blade propeller! The diameter looks alright with about 150cm. So far my best results I achieved as well with 150cm 2-blade propeller (3d printed). It looks like that the pitch could maybe to small. Are the blades feeling stiff?
Hi @superlefax the pitch is my greatest concern also. The blades are very thin and sharp. They do feel stiff but are somewhat brittle, you can easily make a small dent. On the other hand since the prop is injection molded I saw them on alibaba for as little as 20 cent on large MOQ’s.
In 2018 when I started my build there were little options for a suitable ESC. VESC 4.12 could not handle the current other 130-ish ESC’s where exploding like fireworks even on geared setups. So naturally I went with this big red Chinese piece of shit.
I know many on this forum feel my pain!
Problem number 1:
The esc would not spin a 100 kv MP 56115 motor (also horrible unbalanced Chinese piece of shit) even with no load and no prop.
After going threw all available firmware versions available at the time and testing different settings on each (about 2-3weeks) I finally found a version that would detect the BEMF of this shitty motor. I was super happy and full of hopes for water testing…
Little did I know that I had probably the worst ESC, Motor, Prop setup that was possible.
In this video you can see several problems:
Flier ESC is not designed to work with low kv motors!
Flier firmware has low starting current!(the current that is applied during open loop startup is about 0.8 A) this parameter is not configurable and you need to get a custom firmware from Flier (witch I managed to do after 3 month and 150 emails). It is very hard to convince Chinese “engineers” to change parameters that they do not understand…
Flier firmware has a relatively high BEMF threshold. When a low kv motor is limited to low current it spins slowly. Thus generating low BEMF voltage. So when you try to start the motor under load there is not enough BEMF and after spinning for some time in Open Loop mode the Flier shuts down. That was incredibly hard to explain to Flier…
Now there is a discussion about timing setting for Flier.
My extensive testing showed that all it does is makes the motor spin faster at the expense of efficiency. Ideally you should never set it above 1!
I recommend a simple experiment: spin the motor for 5min with timing set to 1 and make a temperature chart and then do the same with timing set to 30.
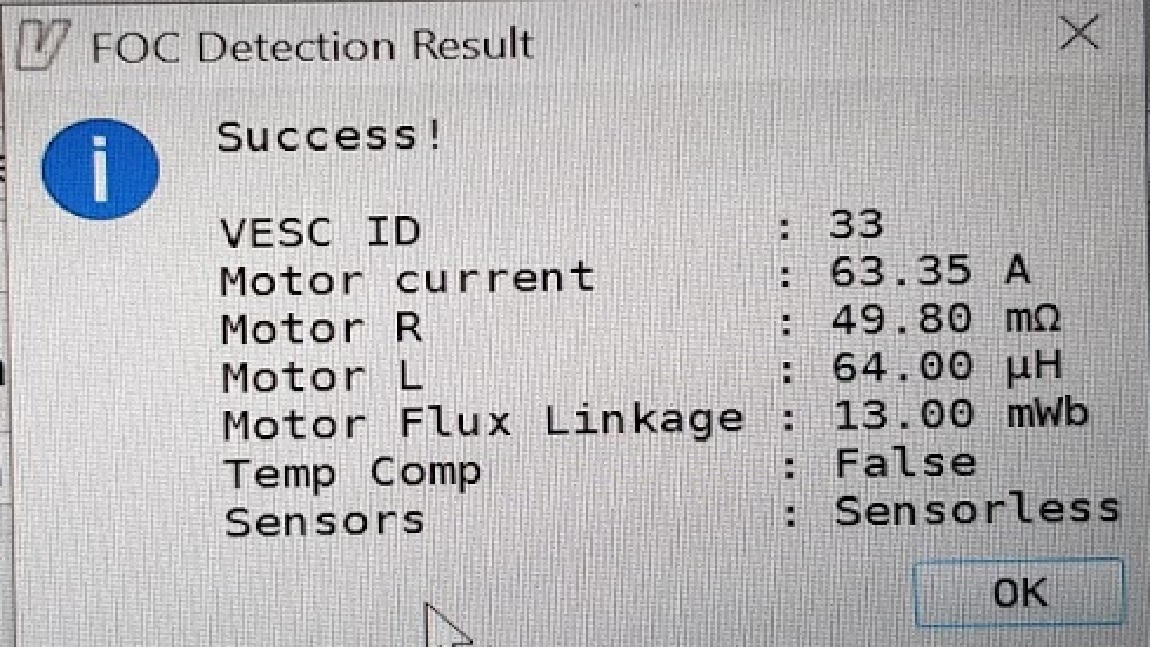
Recently I have switched to VESC 6+ trampa. And the only thing I can say: GOD bless Benjamin Vedder!
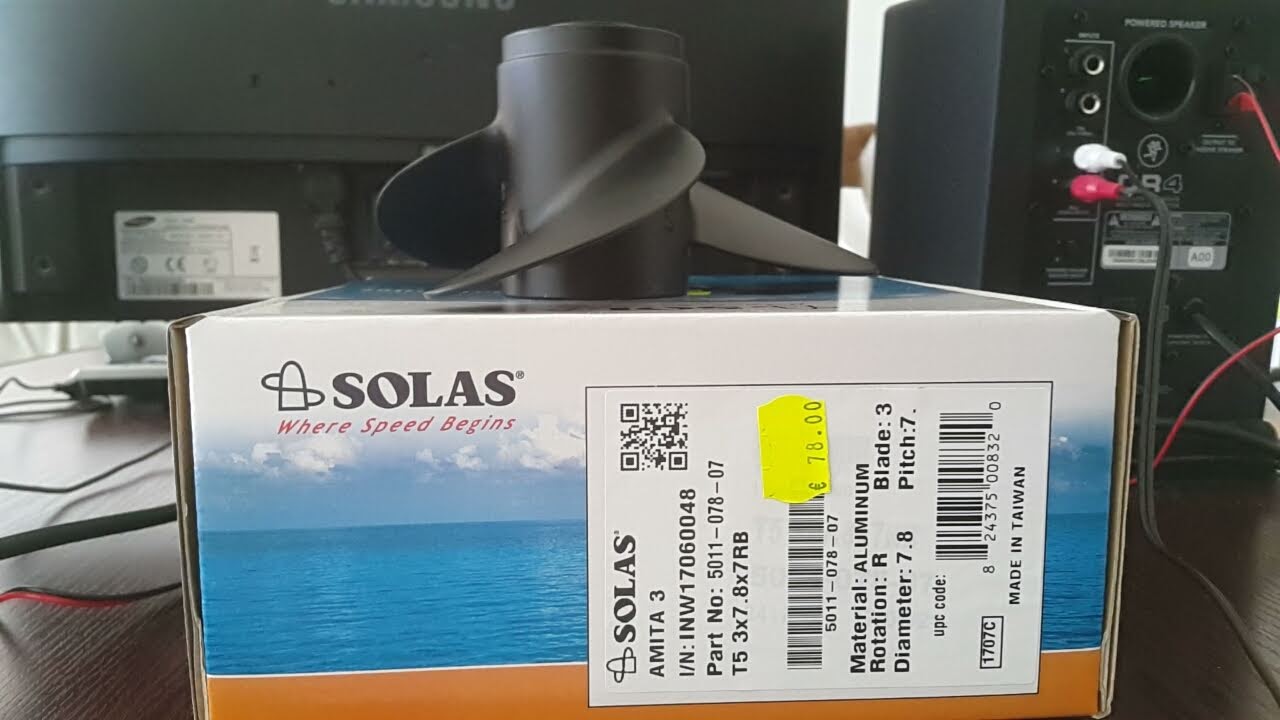
Hi @Sliman_O currently I’m using a different motor and a 6 x 4 inch 2 blade plastic prop as described in my Prop post. I am searching for a higher pitch same dia prop thou. 7.8 inch is way too big. It was one of the reasons I could not start the motor under water. The important thing I learned is that you should never go above 160mm. Even geared setups struggle for torque at that diameter.
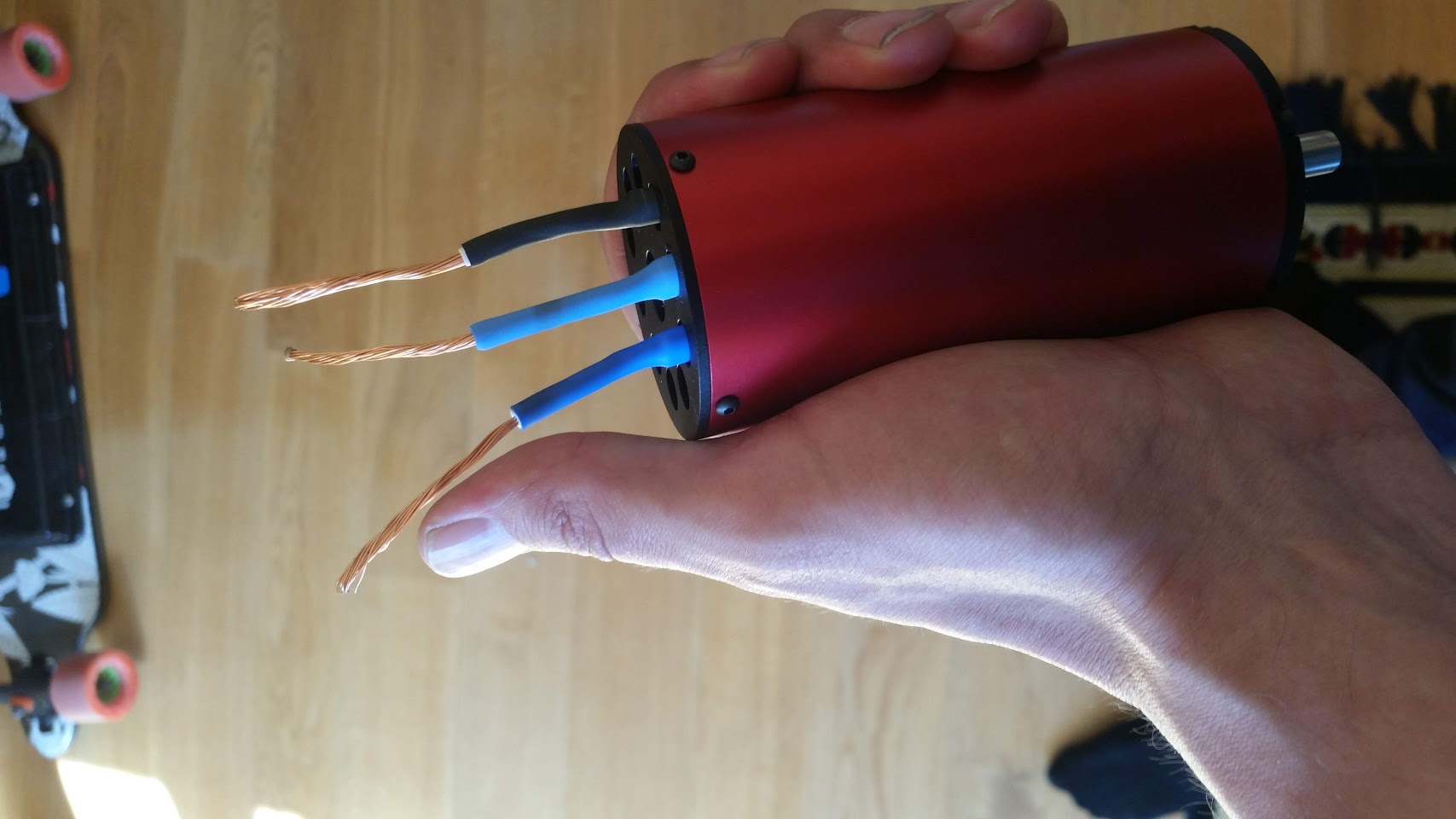
They used to claim that it was 8 poles but it only has 6!
The rotors are allays unbalanced so it makes horrible loud noise and vibrates as crazy.
It is so poorly engineered that after a few minutes of running it with no load it would get so hot it is uncomfortable to hold in hand.
After a lot of trouble and desperation I managed to get it to spin in the closed loop mode under water.
A custom firmware for Flier ESC was needed.
As you can see in the video the motor is barely spinning on 50 volt 12 Amps.
So naturally feeding it more amps let me to burning 4 of such motors…
The current was limited in this test to 12 amps by the power supply.
Being pretty happy with the results I decided to up the ante… 20S and throttle to 80%.
20 Kg of static thrust was a great result. Unfortunately after this test the motor was fried.
I was still hopeful so I got a couple more of those motors in hope that a smaller prop may fix the problem.
And it did … sort of…
The first test fully assembled:
And the first water test 12s and 6 x 4 plastic 2 blade prop :
As you can see everything went fine except the speed was not there so no foilling on my first attempt. (one of the possible issues could have been the absence of a pin to fix the prop in place so there probably was a slip there).
On my second attempt. The small plastic prop got broken so I threw the large 7.5 x 5a Yamaha prop at the last moment. The Battery was reconfigured to 20S, so with no current control on Flier it is not hard to guess what happens…
And that was the end of 2019 Testing season for me.
So I decided that not to torture the second 53112 motor I had an put it on my little brother’s eske8:
I got myself a VESC 6+ Trampa. And a pair of new motors. The only thing missing is a low diameter high pitch prop.
I know this motor will be interesting to some of you so feel free to sugest a test I can do using a VESC6+ and a small indoor pool(really small) I have access to.
The Side by side comparison is hard because 53112 is not waterproof and is mounted on Eske8.
The torque difference is so big I feel there is no point torturing that little thing
Hi Konstantin,
Why don’t you want to give us more details about the source ?
Did you design the 72mm new motor all by yourself with the help of a chinese motor company ?

























 so no foilling on my first attempt. (one of the possible issues could have been the absence of a pin to fix the prop in place so there probably was a slip there).
so no foilling on my first attempt. (one of the possible issues could have been the absence of a pin to fix the prop in place so there probably was a slip there).