Since I don’t have a water sealed board yet, I decided to work on a remote that can work with all ESC’s including VESC and any commercially available certified DC motor controller like the one in the link:
Radio communication is based on nrf52840 chip.
Remote/Transmitter:
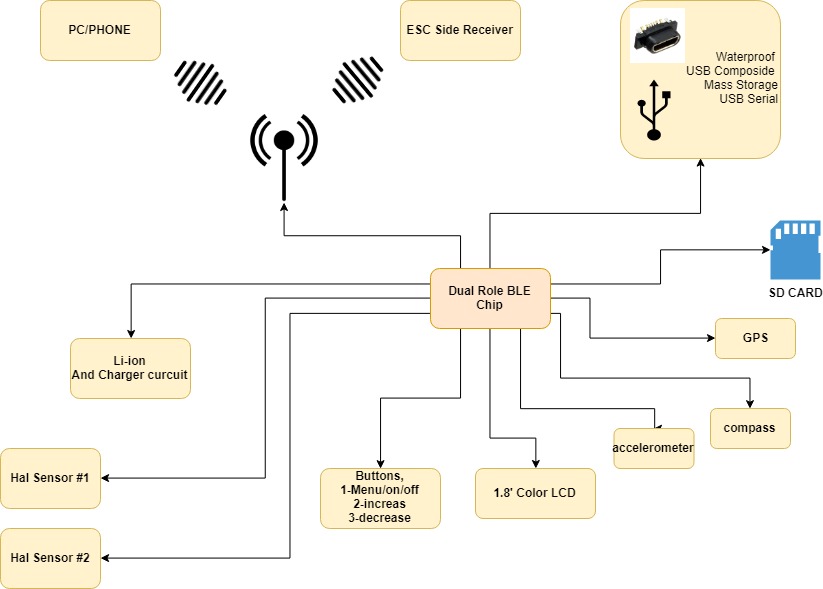
** At the Transmitter side* this BLE chip will act as dual role Central and peripheral this means it will act like a bridge between smart devices and the board. With this approach firmware upgrade will be super easy for all MCU’s remote , reciever and VESC.Also will make it possible to develop an app to view the Log.
- SDCARD: As you can see there is a micro sd card which I might switch to flash after testing Alpha version. Remote logs all the user inputs, VESC data, GPS and compass curentlly in raw log file but I am planning to make it kml format so we can directly load it in google earth.
** There is a waterproof USB port ,* as soon as it detects the port, it mounts sd card as mass storage and all logs will be available to download or be parsed in future efoil software, But there is another great feature here, a usb over uart port to be able to communicate with VESC ![]() this means you can use vesc tool (vesc desktop software ) to configure the esc without plugging the vesc with wire very convenient since usually esc is not very easy to access in the board.
this means you can use vesc tool (vesc desktop software ) to configure the esc without plugging the vesc with wire very convenient since usually esc is not very easy to access in the board.
** Compass,* I think it is good to have compass available on the screen on demand, in case weather gets crazy suddenly you can to the sure ![]()
** Dual Hal Sensor Approach:* One think I really like here is dual hal sensor for redundancy, if for any reason ( water leak sensor malfunction … ) one sensor malfunctions mcu will stop throttle or will go to safe mode!
*Accelerometer : main reason is for fall detection to be built in the remote
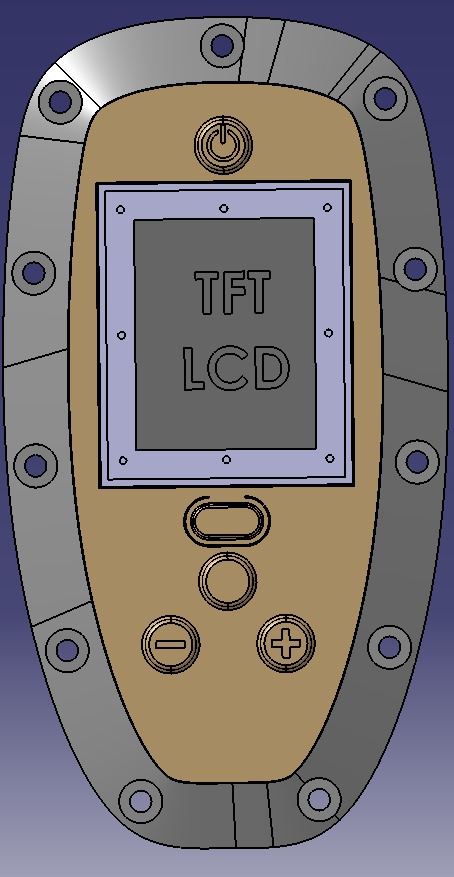
** 1.8" Display:* this relatively large screen will allow to show more information the screen is ST7735 and the gui is is using littlevgl library, very reach library and super fast! I ported it for nrf52840 and running the screen at 32mhz spi port . I did some test under the sun and seems high contrast colors are visible enough. If not I will change it.
Receiver:
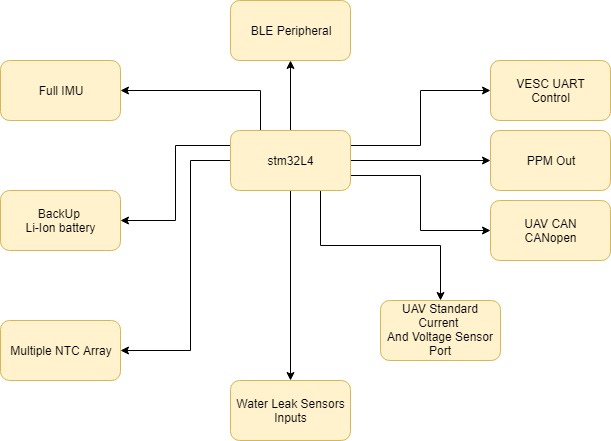
** Radio:* Another BLE chip will handle just the communication
** another MCU stm32l4* will handle all the realtime measurements, safety and communications:
** Comms:* I love this part, With having uart to control the VESC, PPM for general ESC, UAV CAN for VESC or multiple VESC and CANopen to control off the shelf motor controller like the one in link below:
I think everybody would be satisfied.
** UAV Current and votage sensor:* In case someone decides to use simple ESC and DIY battery pack with no CAN port, with using one of these sensors: HS200HV - Mauch Power module up to 14S (200A) : Drones, UAV, OnyxStar, MikroKopter, ArduCopter, RPAS : AltiGator, drones, radio controlled aircrafts: aerial survey, inspection, video & photography
The battery pack voltage , current and power consumption will be monitored and cut off voltage and consumption can be configured.
** Water leak sensors:* Strips of flexable PCB’s to placed around the hatch door or any place to detect the leak asap, notify the user and failesafe.
** multiple NTC’s:* to measure any temperature and set the false-safe threshold it can be batteries, ESC, motor…
** IMU:* Having full IMU to log board and rider behavior, plus secondary fall detection.
Current State:
- Transmitter:*
- right now the mountable mas storage, serial over USB bridge, User interface, VESC control over uart, logging gps and VESC telemetry data and lots of main futures are implemented in the dev board and I am waiting to wrap up the remote CAD modification to start the alpha proto PCB. I will switch from POT based thumb joystick to hal sensors.
Receiver:
- VESC bidirectional uart communication is done and throttle updates between 7 to 10ms.
RoadMap:
I am hoping to wrap up the electronics and firmware in 3 alpha beta and candidate release. At every steps.
Alpha: In Alpha Version I should have current futures plus reliable hardware for Tx and Rx to start testing both firmware and hardware intensively.
Beta : while firmware development will be an ongoing effort, at some point after compiling test results from first revision, I will spin anther version of hardware and this time it will be a big change in Rx side with adding secondary stm32l4 MCU for all the futures mentioned.
At firmware side, Tx should accommodate GPS assisted Cruise mode, precise fall detection and Over the Air firmware update. Rx firmware should accommodate temperature monitoring, external current and voltage sensor and warer leak sensors.
Candidate Release 1: Hopefully this will be just firmware features and minor hardware changes. Specially CAN communications for UAV can and CANopen to support commercial off the shelf drives
Candidate Release 2 until official release : fine tuning firmware and hopefully desktop configuration software to configure all parameters, CAN messages, Log Viewer and data analyzer.
At every step I would be more than happy to send out couple of hardware to forum people for testing and getting some feedbacks to improve. Also please feel free to share your ideas and inputs.
Watch the working proto in the link below:
Thank you