Hi all!
I’m new to this forum. After watching @pacificmeister’s videos, I really got inspired to start a build, however I realized how complicated it would be to make a system with a gearbox, like he did. I already experimented with bldc motors underwater, and thought about just submerging an large outrunner with a low kv and attaching a prop to it. I kept searching and found @jakebarnhill1’s build. I saw how it was much simpler and cost effective, since it eliminates the requirement of an expensive gearbox.
Additionally, I really would like telemetry to monitor every component’s temperature, current and voltage, since we’re dealing with high power systems, and safety is a major concern. With this in mind, I decided to work with arduino, because it’s relatively simple to implement and I’m familiar with it.
For a safe and reliable esc, I went ahead and decided to use the Vesc 6, since they’re high quality, fully programmable and even have a uart port to send the telemetry values to the arduino, removing the need to use individual sensors. I later decided to use a dual setup, since I thought it would stress less each vesc, by limiting the current of each.

New Vesc 6 Plus (since they stopped selling the regular Vesc 6):
http://www.trampaboards.com/vesc-6-plus-benjamin-vedder-electronic-speed-controller-p-26762.html
For motors, I decided to use the Keda 6364 190kv, since they are cheap, have medium to high quality and were used successfully in @jakebarnhill1 's build. Since I leave near a lake and saltwater is no where near, I don’t think i’ll need to protect the motor’s windings with epoxy, but time will tell if i’ll ever need to do it.
Keda 6364 190kv (sold by HobbyKing):
https://hobbyking.com/en_us/kd-53-30-high-voltage-brushless-outrunner-190kv.html
I’m planning to use two 20ah 6s lipos in series to provide a 20ah 12s pack for plenty of run time and sufficient power (as they’re theoretically rated for around 200A).
Turnigy 20000mah 6s 10c (sold by Hobbyking):
As for the whole control system, it’s almost finished, it’s based around the arduino pro mini. It has ports for the nrf24l01+, a 16x2 lcd display (optional), a momentary ip67 button with led builtin, a port for two optional thermistors (that I’ll use to measure the batteries’ temps) and a port for the ppm & uart communication with the vesc. The main issue was for the communication between the arduino and Vescs, since the documentation was for only using a single Vesc. I ended up using the VescUartControl library and modified it to work with two Vescs over Can-bus. This allowed me to connect the Vescs together with a regular Can-bus cable and only connect the arduino to the master Vesc’s uart port.
For the remote, I decided to model it in Fusion 360 to later on 3D print it.
First Version: Autodesk Viewer | Free Online File Viewer
The first version was a proof of concept. It worked flawlessly. It consisted of a oled display,
a nrf24l01+ module, an arduino pro mini, a vibration motor (for warnings), three WS2812b leds, two buttons for cycling through the screens and another one for triggering the cruise control function, an 18650 cell, a tp4056 charger with a boost converter, and a trigger using a hall-effect sensor. Additionally, it had a accelerometer for detecting the user falling, send a failsafe to the control unit, resulting in the instant stop of the motor.

The main issue with this remote was that it would be very hard to waterproof and it wasn’t very ergonomic. So I changed the design:
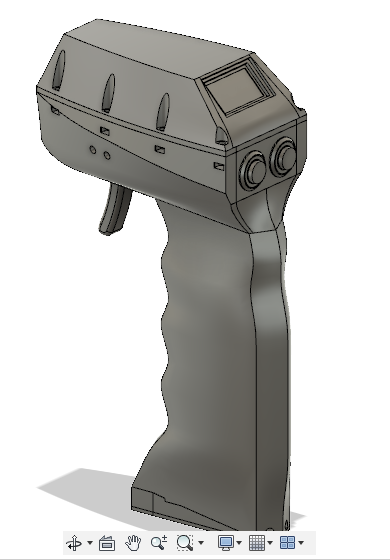
I’m still working on the second version, but the main differences are:
-
Builtin QI wireless receiver, allowing for wireless charging, removing the need of a hatch that needed to be waterproofed;
-
Using a 2000mah lipo instead of a 18650 cell;
-
Using two IP67 metal buttons with leds instead of two small buttons with separate leds;
-
Removing the mpu6050 accelerometer to detect a falling user, since it isn’t very accurate in terms of realizing this situation (probably i’ll switch to a JetSki cutoff key like @pacificmeister did)
For the board, I’ll be initially testing the electrical system on a Stand Up Paddle board, for later on buying a foil board.
This is a slow project, I’ll probably finish it by the end of June.
Any feedback is more than welcome! Thanks guys!