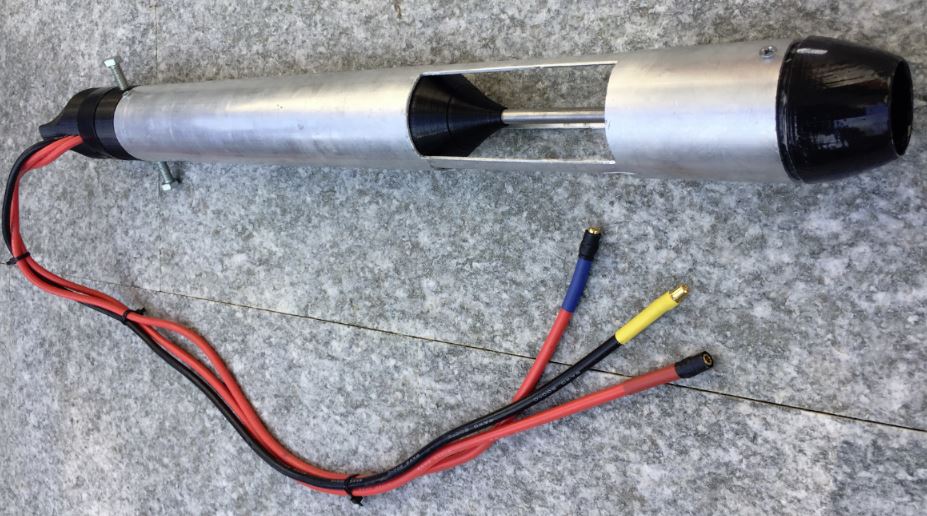
This is Paolo from Italy and below you see my Sardone build.
It is a Jet setup, with many parts inspired by @PacificMeister, everything in the 60mm pipe as I saw on the elegant approach of @VeFoil.
It Run With Lipo 16S, SSS 56114 360KV, Esc Flier 400A
Before to put it under a board I’m testing in a test bed where I found some main weakness which I tried to address.
Like this
Now I have a very strong Carbon fiber Impeller of which I’m very proud of (Diameter 55.5mm, Pitch 44mm). It is inspired by @Virus which videos I study frame by frame
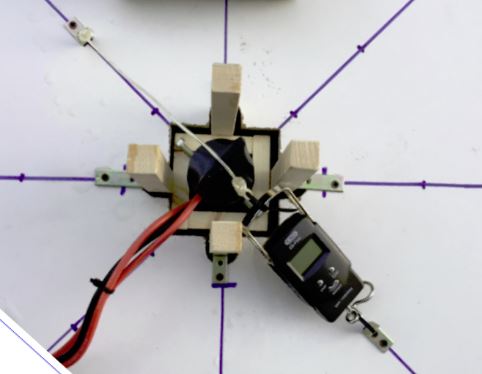
As a test bed I have a bin full of water with a cover and some rails.
Then you can see a luggage scale on the right which I use to measure the static thrust.
Actually I measure the lift like it was a rocket. I had to secure very strongly the cover to the bin to avoid everything literally jump out from the bin.
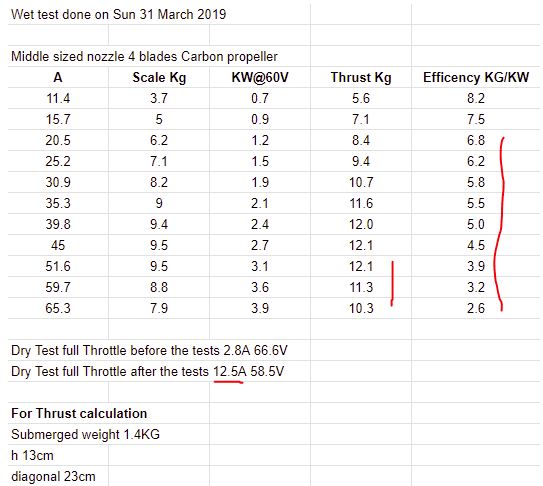
Of course I applied some easy calculation to get the thrust from what you read from the scale, it includes the parallelogram rule and the Archimedes’ principle. Here is the point, one of the test measures I took is below:
So my points are:
Max thrust I can squeeze is 12Kg not that much, I believe not enough to fly!
Efficiency is dramatically decreasing as the power increase
Dry test at the beginning is cool, but after the test I see a severe issue (I think it is due to the leakage)
I do not want to give up, I do not think this is a dead end as @mat said
And also I understand @VeFoil is getting 27Kg of thrust out of the jet (here)
My next step would be increasing the impeller pitch to 20mm, but I would really appreciate your thoughts.
Are you sure that your calculations are right?
Over the thumb I would say your thrust is a bit less than twice the scale reading + ca. the weight of the rocket (I didnt run the numbers, but your string splits the force to 2 fixations of the string (like a pulley) and your scale measures only one side, but I has to be less than x2 since your string is not vertical and so you got a horizontal part inside your scale readings (should be about x sin(angle of string)).
So you would actually be closer to 20-25kg thrust…
Dont give up, whoever said its a dead end. There are way more combinations with jet rather than prop only. Way harder task than prop setup if u ask me, but not a dead end!
Since the input current when running in air changed dramatically before and after the in water test, I assume either your setup wasn’t waterproof or your motor is damaged due to overheating.
Also your freerunning rpm with 50V 360kV would be 18,000. Thus you would reach the maximum output power at 9,000 rpm, which is probably not enough to create sufficient thrust. So yes, the first thing you should do is measure the max rpm when submerged.
I assume your pitch per full revolution is 44 mm, not 11, right? If you want to accelerate the water to 30 km/h or 500m/minute, you’ll need more than 50krpm at 11 mm pitch or about 15krpm at 44 mm.
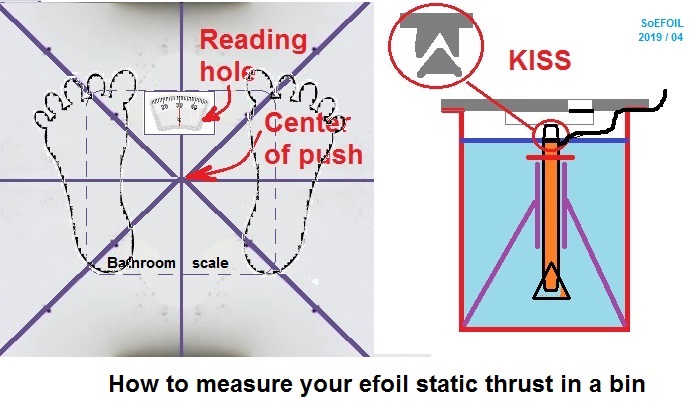
Congratulations for what you have reached so far. As said earlier, your way of using the luggage scale might need some tuning (coefficient). A static pull or push inline with the scale provides best possible results. Therefore, may I suggest a method adapted from @Frage and his bathroom scale method ?
You could make a hole in a board to the size of the scale display.
The bathroom scale being pressed between this white board and the water jet tube…
CON: the wires will be submerged
As @Giga said, in response to @Dynamik , I think that @Mat meant “I would like to get stuck in that kind of dead end any day” regarding the quality of the esurf.com impeller - A beast: 20.5kw = 50V x 410 A
Okay, according to your number (13cm height and 23cm diag), angle between rope and platform is ~48.5deg.
Formular so your thrust in KG is then: F(thrust) = (2 * F(scale in KG) * sinD(48.5)) + Weight(whole rocket in KG) - Volume(submerged Rocket while test in L).
2 * sinD(48.5) is a factor of ~1,5 so if you look at your numbers at e.g. 40A you have to have at least more than 14kg thrust, probably a lot more (assuming the rocket is not lighter than water).
l * Sin(a )= h, Sin(a) = h / l = 0.565 then h = l * 0.565 (same proportion of the force component)
What you read in the scale is W1, (the red force on the right), but to keep Sardone in place you also use W2 which is the same as W1.
Then you have the Sardone weight (S) that has to be measured when Sardone is partially submerged as it is in the test. S = 1.4Kg
So Thrust T = 2 * W1 * 0.565 + 1.4 (all in Kg)
That’s where the numbers come from.
Thank you @SoEFoil, your solution is Super Clever, but for my case, at this point, it is easiest to fix the formula if it is wrong.
By the way, the trick I secured the cover is this:
With a Ring of sealant to avoid showers.
A bathroom scale price starts as low as 10USD / EUR. At this point, it would be interesting to compare both method displays. Looking forward to your results.
Interesting, but I’m lost here. Why freerunning at 18,000 bring a max output power a 9,000? I would explain why efficiency decrease, but I cannot see why. Would you elaborate it?
Unfortunately I do not have any way to measure rpm at the moment. I understand that the only way is to get a new very expensive ESC. Or there is some easiest way?
Yes, it is a point, I also think I have some cavitation. I put a camera inside the bin and I can see bubbles. Maybe it is not clear from a single frame, but I see bubbles although I cannot exclude they are coming from the water turbulence on the water surface.
You are using 4x4s for the lipo ? What capacity? Because 60a down to 3,7v/cell with a 4s 10A for exemple gives a 6C , my pack was discharging at 3c and i couldn’t enough power at this end
Motor or lipo get hot at the end tests?
Oh, I assumed your diagonal was from head of W1 to head of W2, like from mounting point to mounting point of the string.
But then ok, having such a low angle will cancel out the effect you get from the pulley design.
Every BDLC motor has technically the maximum power at 1/2 * n0 (freespin RPM) or in other words at 1/2 M0 (starting torque). Just look it up, the formula is super simple, power is proportional to n (RPM) * M (torque), at 0 RPM you get high torque but thus 0RPM also 0 power, and at max RPM you get 0 torque, so power is also 0.
For max power you got to find the extremum which is at 1/2 of the dependend inputs.
RPM (blue), Current (red), Efficiency (green) and power (yellow) over Torque on bottom axis
And as you can see, efficiency is quite bad at the max power, thats why you might want a max. 6kW motor to do a 2-3kW job (except weight or volume is critical).
Your efficiency obviously also follows the graph above. It has to decrease since more (motor) amps means more torque for BLDC motors, so you will move to the right in the diagram.
Every ESC with telemetry can tell you the RPM (since they have to track it to commutate in the right moment) so the flier has a pc connector? Maybe the software can give you some output?
Or you can try some stuff like:
But I am not so sure how good it works with non combustion engines.
Still you should be able to just record the sound and have a look at the audio file e.g. via audacity. Android devices should sample with 44kHz, your signal is <350Hz, so you should look for a repetitiv patter with more than 125 sample points and measure the time interval between. Maybe you can even extract the pattern from the audio spur of your gopro.
i was thinking more about this kind of graph, this is for 350kv and taking 3nm of torque for a max power to equal the max output amp of this kind of motor : around 130A