Hey,
finally i had the time to share my build.
Bur first of all a big thanks to Pacific. His videos were the first I have seen regarding electric surfing. After i watched two of them i decided that i need to have one and to build my own one
To me:
I am guy from germany who never was surfing before. But i like, sun, water and especially things with motors xD.
Lets start with my build.
In most things there is nothing realy new.
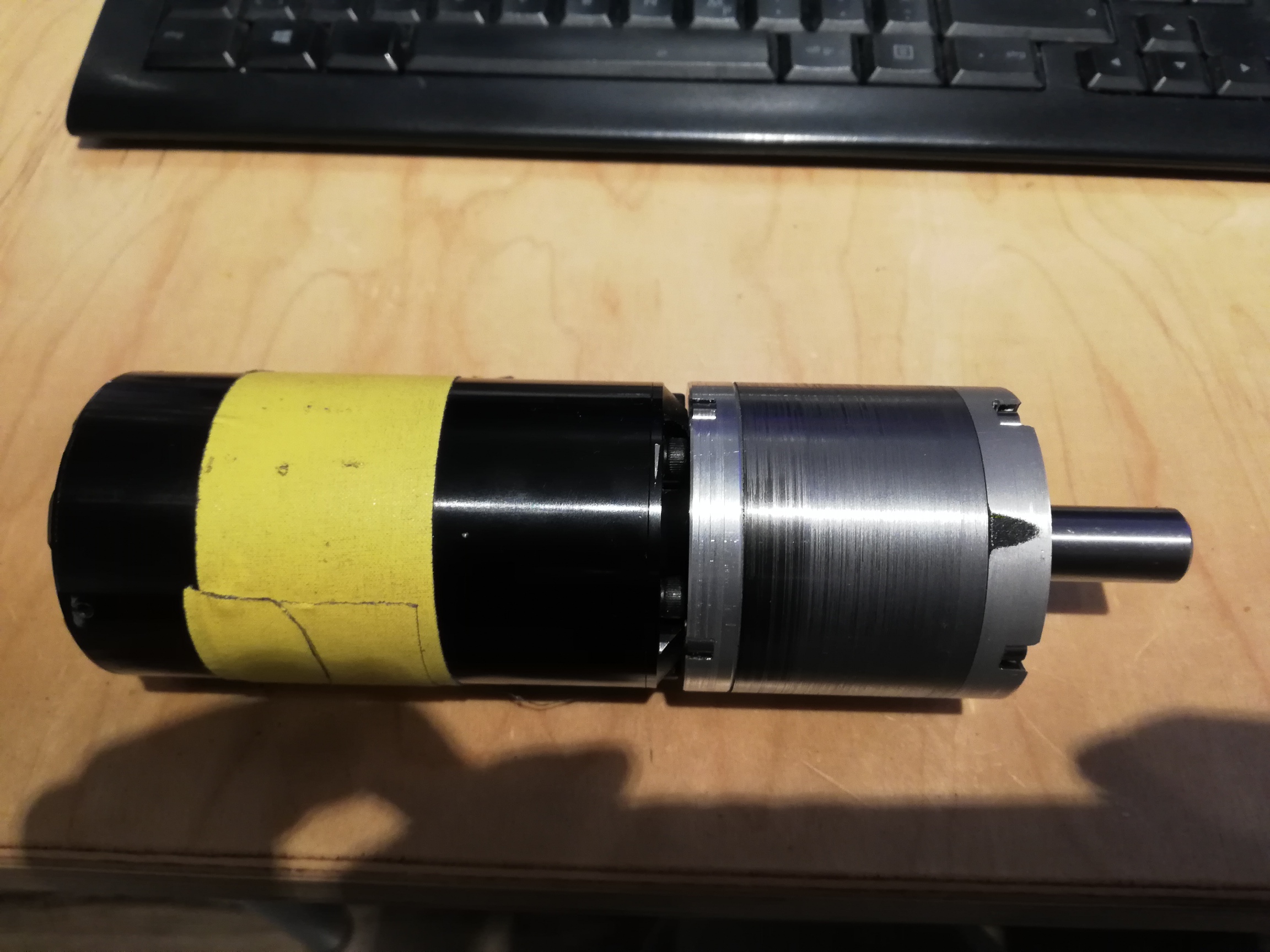
Motor: SSS56104
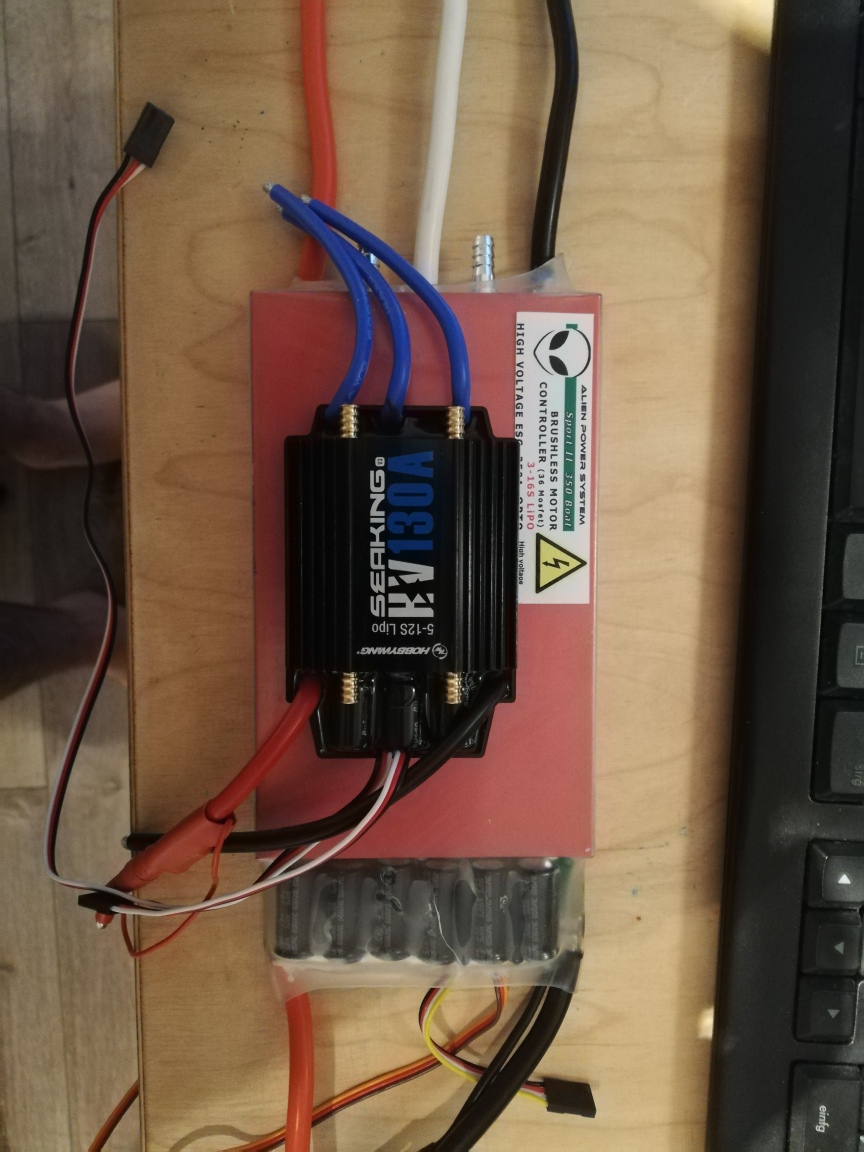
ESC: Seaking HV
Gearbox: Modified Nema 23
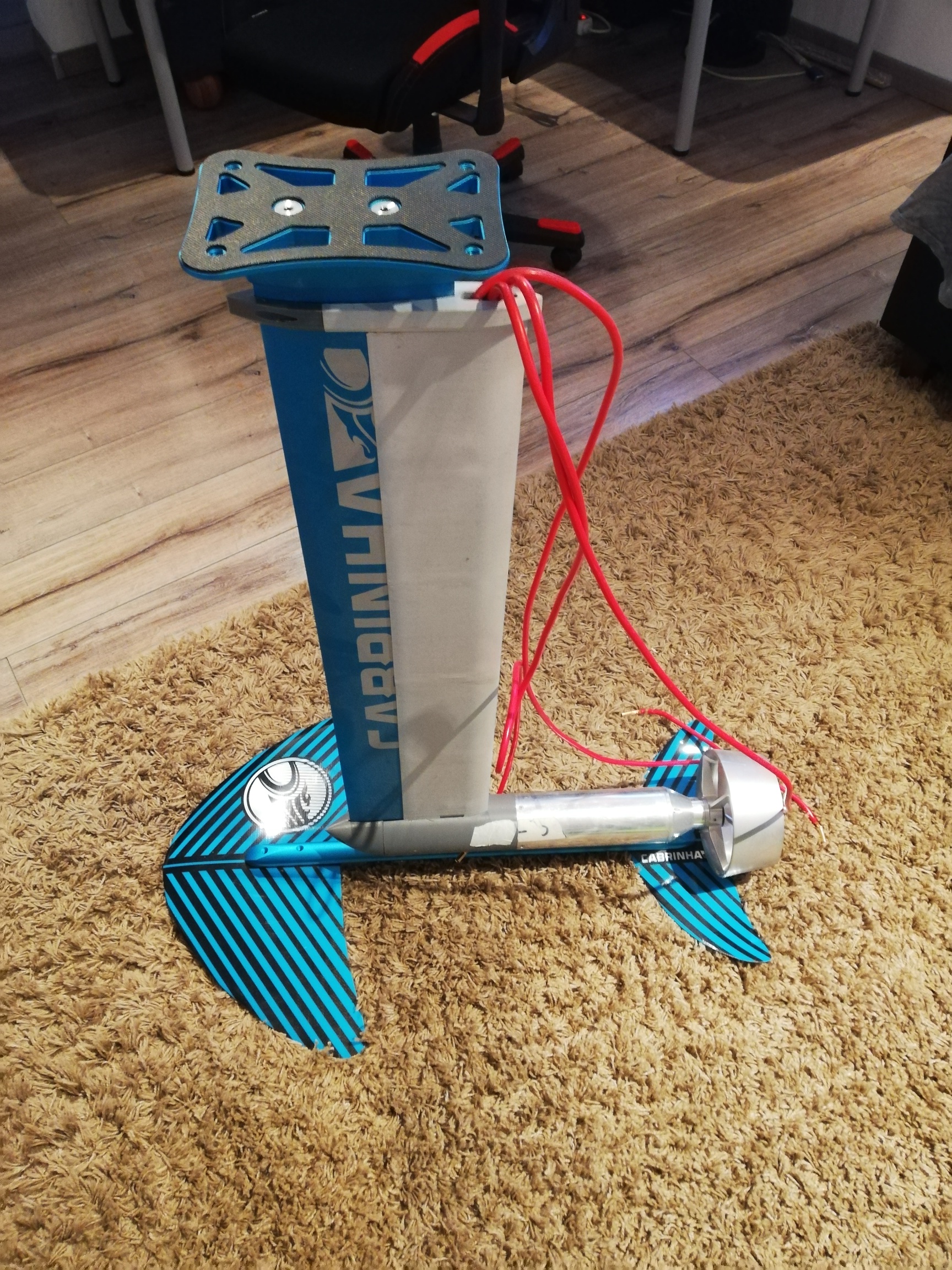
Foil and Mast: Cabrinha Doulbe Agent
Board: Selfmade, but not finished yet.
Prop and Duct. Kenzen RC
I also made some tests in water this winter and for now it works pretty fine.
I had some problems with the nema gear but after some rework it seems to work aswell.
I havent measured the thrust yet but it made a lot of waves
The motor was running on about 4KW for a couple of minutes without any issues. I think this is enough for take of.
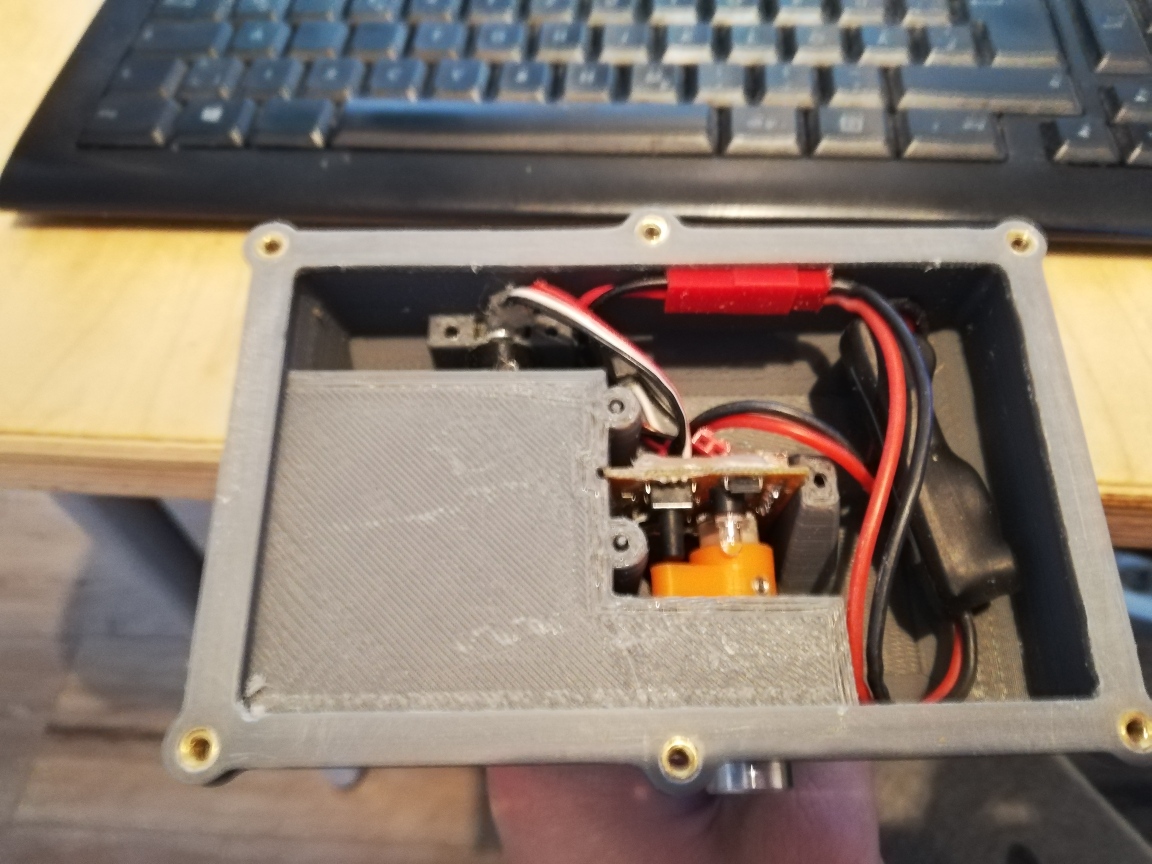
The Remote is completly designed by myself, except the electronics. It has a build in VA meter with a lot of information shown on the screen.
I decided to not use water cooling because i dont want to pump water into my waterproof electronic box. For now i dont know if it will work very long but i will give it a try. The ESC is mounted in an alu box and is thermally connected via gap filler and heatpipes to the surface of the cooling ribs.
I will post more when i have the time to build on
If you have any questions, feel free to aks me. I will also share my 3D models if anyone is interested.
Nice build. A bigger wing like a Slinghshot infinity 76 or 84 will help reduce the amps and heat needed to foil. Much easier to learn. I am using the Kenzen rc 150 mm Kort nozzle and it works much better than the 80 mm I started with.
Cheers.
Hey,
thank you for the information. I bought the cabrinha because of it was very cheap ^^ if i need a bigger wing i will laminat a wood plank. I have it already at home.
I have the 130mm and it think its very well balancend with the 5:1 gear. I have a Motor Phasecurrent of about 110A. After several minuts of full throttel the motor and gear were very cold. On air without load the motorhousing is very hot after about 60 seconds
Sure,
inside there is a 3s lipo for the Wireless VA meter and a BEC for the sender. Unfortunatly it is not possible to log the data. The shunt could measure a current up to 300A. The trigger an trimmer are potis with radial shaft seals. The best point about the VA meter is that you can display the ECU temperature and you also will see live the motor current. In case of a defect of the gear or something like that the current would rise .
Hey,
here is video from my last water test. I think this should be enough thrust for foiling ;). We tried to hold the pallet, but at half throttel it wasnt possible anymore.
This is the stuff i used for all of my threads in 3D printed things.
I know thats a shit load of money. But the inseres are quite cheap. Arround 15 Euro for 100 pieces
And they are working!
The housing itself is completly printed and has 4 parts.
Then there are 5 things remaining.
2 Flat seals and 2 aluminum shafts and a spring for pulling back the trigger.
In total i think i have spent arround 100 Euro for the remote.
At the moment we are building the 3d drive with nema 23.
Here are some pics of what we did to get it working.
First of all you have to remove the shaft sealing. This thing produces so much heat at higher rpm
The next step is to make a new bearing shield for the drive side and change the motor bearing shield that you can flange the gear directly on your motor. Sorry I have no CAD files here.
The last thing is to turn down the bearing shield of the ouput side to diameter 56.
The probmen here is that you also need to turn down the screewheads to get in your pot,
The output bearing shield is direclty mountet to the coupler housing.
I will post some new pictures when i have reworked the gearwheels.
In total the gear costs around 60 euro and 3-4 hours of work. If you have the machines.
But be aware we were not foiling until now. But we did some static testing including a period of about 10 minutes continous under full load and there were no problesm.
I will try to get my board ready the next 4 weeks and give you a feedback of how the nema 23 performs.
No. I tested it. And there was no water inside after about hour. It has a foam sealing instead of a rubber sealing and it has a little different design. There is always an air bubble between the sealing and the top part of the hatch. But in case of a leakage there is a waterproof box inside
The only thing that im affraid of is a burning ecu becaus i went for passive cooling. But i already ordered the alien sport 2 350A esc which will be mounted under water as a stiffener for the direct drive pot with alien 56200.
Today the weather was fine. So i decided to do the first test
I did not manage to foil more then 5 meters but i was above the water
There were no technical problems and also the passive air cooling did a good job. The Ecu stayed below 50°C.
Nowhere was water after the test. Im so absolutely happy that all the stuff did its job xD
The only thing i have to mention is that my wing is a little bit to small i think.
Now i have to practice as you can see in the videos
Hey.
Small update.
I purchased the gong foil L and it is working very good. And also it is quit fast.
I was riding at forggensee in algäu. But it turned out that e foils are nowhere allowed in Germany. So after 30 mins thee was a police helicopter hovering over me and sending me back to the shore. There were two other that wrote down my name an now I have to pay about 160 euros for 30 mins of fun. The only way to ride my foil is to get a license number. But that’s a little hard for self build things. With this number the I can ride on rivers like main.
I have talked to other administration offices for big seas and at none of them a e foil is allowed.
I am really fucked of because a big electric boat is no problem but a small foil is.
But that’s germany at its best.
Haha o lord here was like that 3-4 y ago with kiters. We got like 3-4 legal spots on 1200(!) islands, jetskies burning fuel 20 (300m is the law) meters from shore between swimmers wasnt a problem, but a kiter half nautical mile from the shore got intercepted by 2 police boats for sailing in “forbiden open sea”. He also had to explain them his kiting licence is valid and it actually exists in the rest of the world Idk how much he had to pay but it was not small amount. Welcome to Croatia At least u got a chopper