WDYM by VESC only feature?
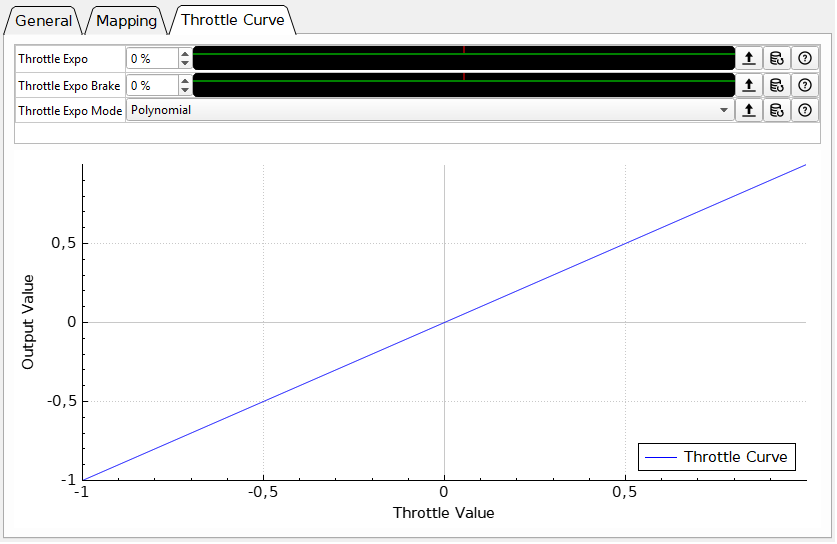
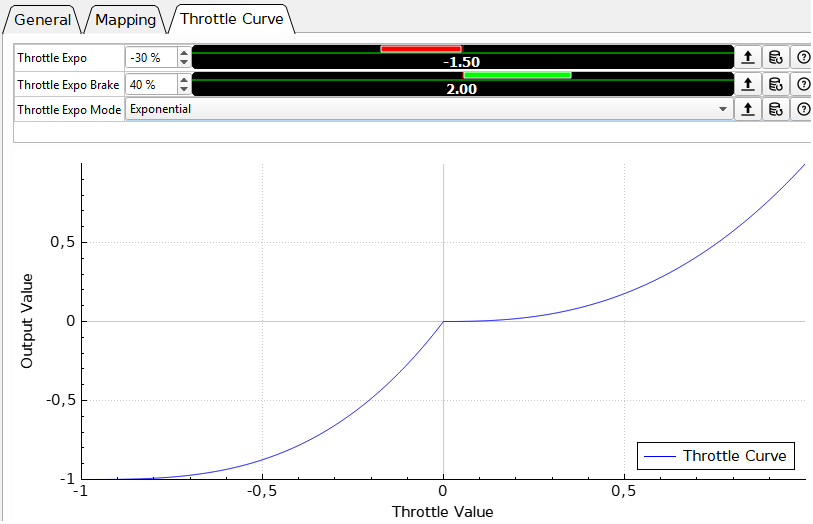
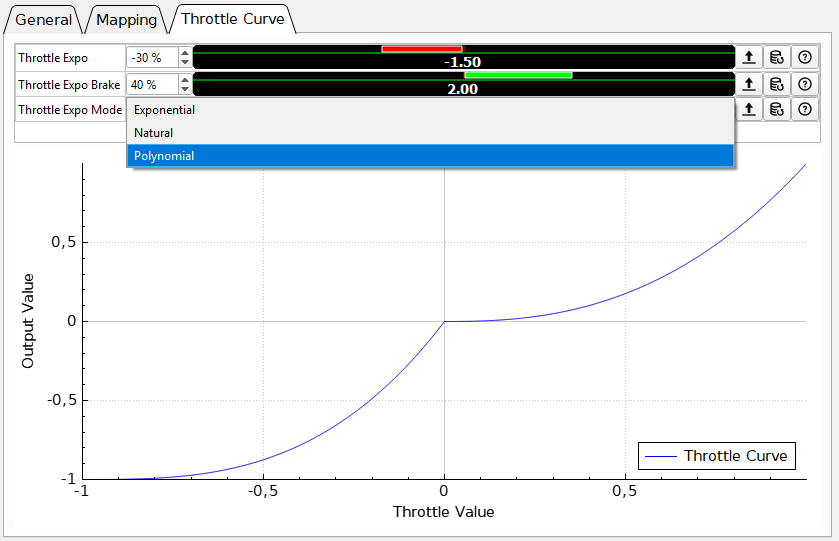
The throttle curve is not configurable, but there are several options that help with having a sensitive throttle (which is key to ESK8).
The only issue with the VESC is the limited power (which the improved cooling solution helps a lot in solving). One evidence to that is that most mountain-board ESK8 is today (including my eMTB) are using a different ESC, which is much more robust, but much less forgiving when it comes to acceleration (the MAX6 by Hobbywing)
Well, first of the all shunts only measure the amps, the mosfets are driven by the DRV and he controlls the amps (whose limits you set before). But you also get all relevant data by the shunts: Ah drawn form the battery, momentary Amps and you can even calculate the remaining battery duration/level (together with the voltmeter).
Hell no, every industry controller does this, but they are big and >2000$, google “ESC shunt” you will finde dozens of industry controllers, some hobby projects and maybe the Kellycontroller.
Well, push him over his limits and the DRV gets deeply offended (he will burn, but only the one chip, not the whole controller). Beside that, look at the ESK8, quite a lot people use them.
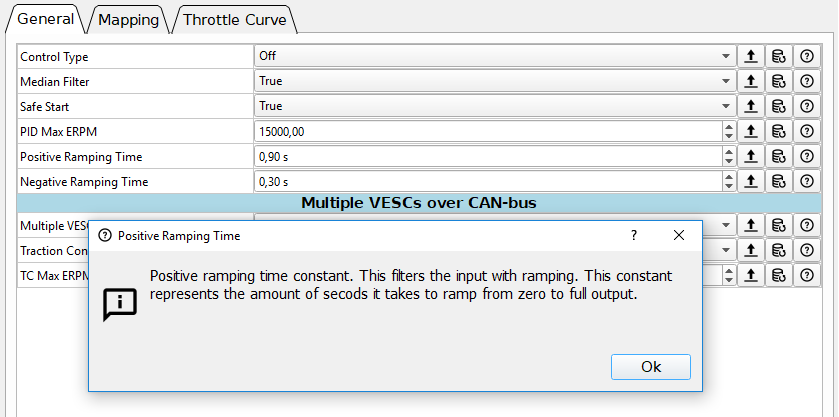
I don’t think so… I’m looking at the “app configuration” section in the BLDC-Tool and it is very limited…
Anyway, good to know - I’m just surprised this was possible without changing the firmware.
@Riwi@VeFoil the heat transfer is proportional to material thermal conductivity (copper being excellent, steel being ordinary), surface area for conduction, and delta T. So you don’t want the water to heat up. You move the water fast as you reasonably can. If there’s a large rise in water temp as it transits your heat exchanger, the temp at the MOSFETs goes UP.
Yeah, the VESC is good stuff. Hence the questions about the draw. I would love to use it in a build but a bit hesitant that it will be able to handle enough juice
I did tests on the max continous current with custom cooling. The standard Vesc 4.12 limits the motor current at about 60A or a little more without forced cooling. I have modified it to use a big aluminium heatsink (electrically isolated but thermally coupled to the cooling tabs on the mosfets). With this setup I used a lathe as a brake and did drive an outrunner (6374 200kv type) with 80A. In this case the mosfet’s cooling tabs did only reach 45°C (~20K temperature rise).
What I’m unsure about now is the claimed ERPM limit. My info was that this 60000 ERPM limit is only applicable for FOC mode, not BLDC mode. Enertion boards claim for their vesc-based Focbox that it’s capable of 100k ERPM vesc.
I honestly have no idea why you’d run FOC on a efoil. It makes sense on a eskate where you can audibly hear the motor, which might be annoying. Also on FOC, you decrease your top speed. I just don’t see the reason for using a less stable input signal for an already high demanding purpose.
If I remember this correctly, this was fixed in the VESC6.
Thanks to @chaka - he shared that he found a pretty hard limit to ERPM’s with the VESC (60k ERPM) - after exceeding it is pretty much guaranteed to fry the DRV chip specific to the VESC hardware.
New VESC 6 does not have this limit.
I personally dont feel its worth designing your efoil around a VESC and the limits it has. Sure VESC’s are cheap $100 but for $200-300 you can get an ESC that will will not be run over its limits and pushed until it breaks. I used a VESC originally, love the idea, but its not a good long term solution and you need to customize it just to try and keep it cool.
VESC 6 on the other hand has more potential, but still your not going to get enough cooling I dont think without water-cooling through it for longer sessions. VESC6 is not cheap, and for the same price you can get proper waterproof esc with water-cooling and not have any issues… My two cents
The VESC is a fantastic project and for sure worth building on. I hope someone here will design a version with optimized power and cooling for efoils. I am pretty sure that will happen and we will all efoil with VESCs soon. There are VESC based high power projects in development using IGBTs that could be used for DIY cars… so way more than we need, see here 150KW VESC | VESC Project and Axiom: a 100kW+ motor controller | Endless Sphere DIY EV Forum

{kind=link}