@pacificmeister’s build videos first inspired me to start a build of my own and I have been tinkering with these boards for almost 3 years now. This forum and community have been a massive help and an incredible resource. Since the start, Ive spent hundreds of hours burning up motors and ESC’s, rolling through spool after spool of printer filament, and crying myself to sleep after countless frustrations (just kidding…kinda). This project is not for the faint of heart although with the release of some key components over the last year or so, building your own efoil is starting to get alot easier for the intermediate to advanced DIYer (I’m talking about some key enablers like the maytech remote and purpose-built motors like the flipsky). Sure the 80100 can work great (I’ve worked with 4 different alien motors) but having something purpose-built right out of the box is a step in the right direction and a welcome break from the usual routine of bathing parts in epoxy and swapping rusted or sandy bearings as a regular maintenance item. Not that there isn’t still some waterproofing left to be done ;).
Even using these components there are still a few basic rules for the first time builder that must be adhered to STRICTLY. These are things I learned the hard/ expensive way and that anyone with a successful build on here can stand behind.
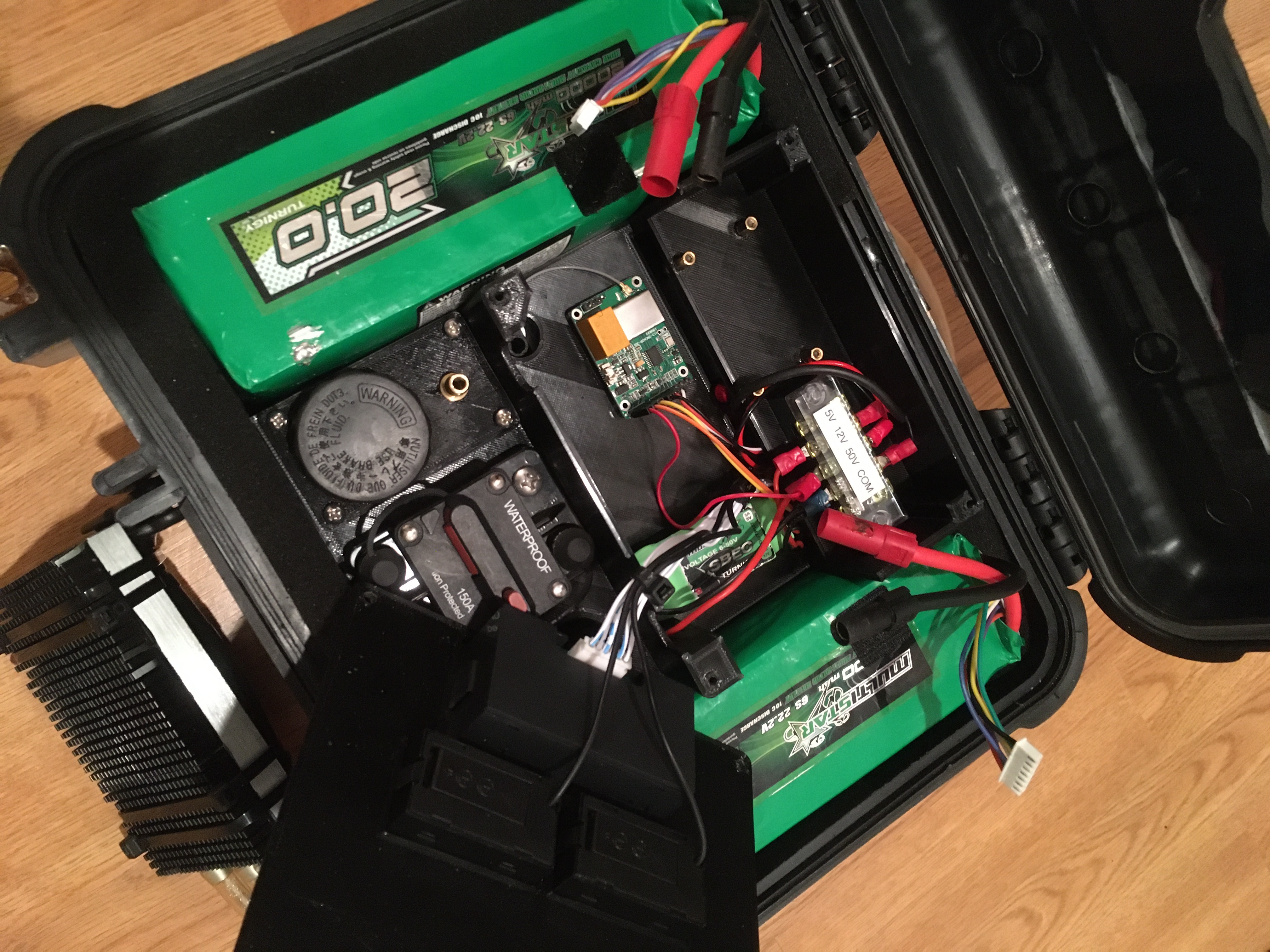
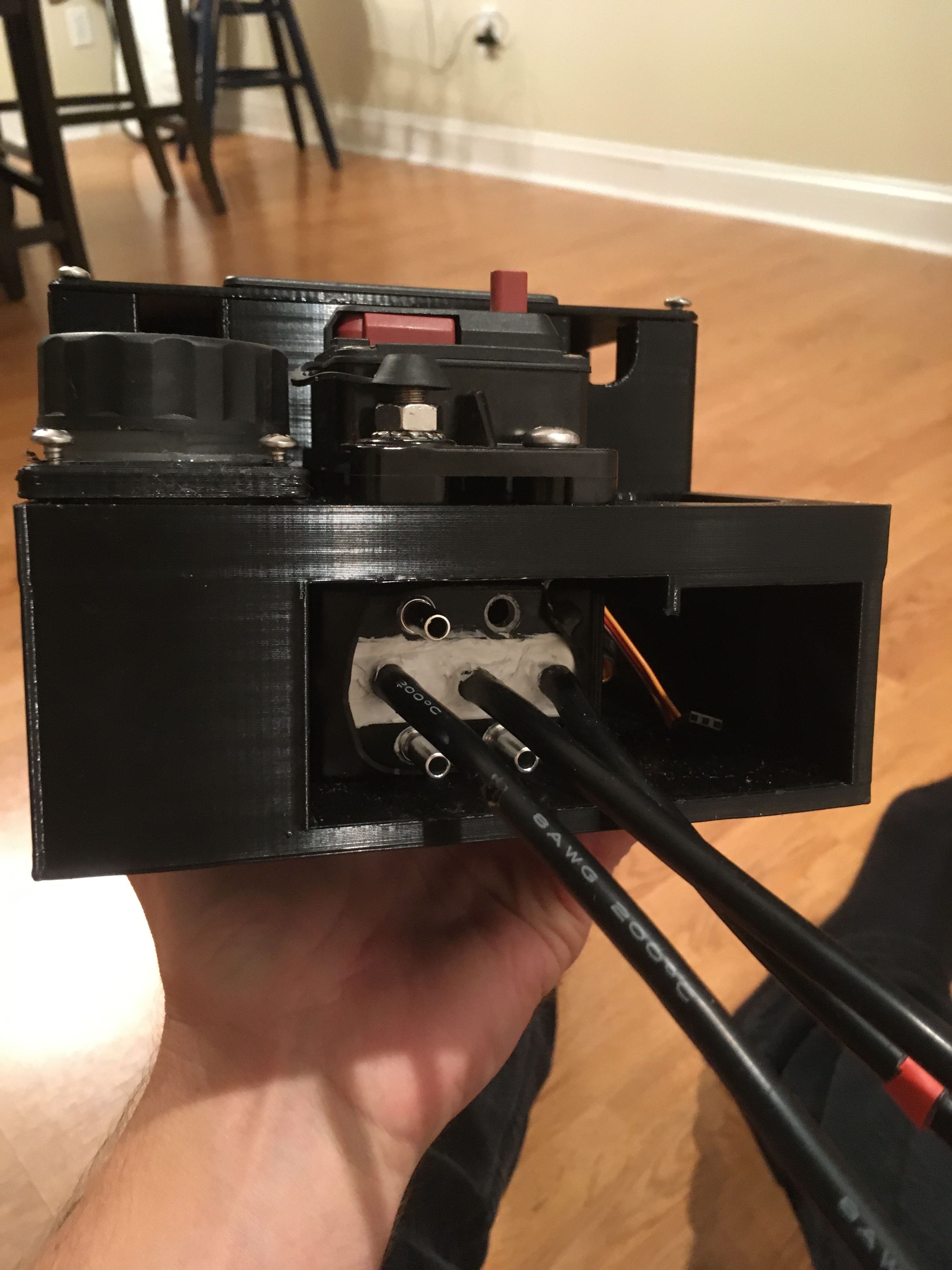
If you “think” its waterproof enough… ITS NOT. Ask me how I know and how many failures it took me to learn this lesson. Build your waterproofing like the board needs to be dropped out of a helicopter into the salty depths and then remain underwater for a week while guarding your high voltage, water-soluble, college fund. Wondering if you need to stop riding to make sure your gear is dry sure takes the enjoyment out of the ride. All that said, try and design in some type of backup plan in case you still managed to underestimate water’s motivation to make all things dry, not dry. In my case, the chassis of my electronics rack elevates all of the water sensitive gear a few inches above the bottom of my battery box. The bottom is also lined with a super absorbent chamois to soak up and water that might make it in and keep it from sloshing around. Allow wires or cooling tubes the ability to get tugged on, banged around or flex without risking the integrity of the seal.
Build EVERYTHING in the power system with the ability to handle WAY more current than you think you will need. Begin this equation with the motor you select (typically in the 5 to 8KW range). Now follow the future wiring up the electrical circuit to the next component, likely the ESC. I would make sure your ESC is rated for at least DOUBLE the rated motor current. In the case of a 7000W motor running 12S (50V) that’s 140A. Get an ESC that is at least 300A. You can go cheap like I did but I will the first to tell you that one 400A ESC is cheaper than two (or in my case 4) lower current ESCs. The same safety factor goes for wires and batteries. Make sure your batteries are rated to drive the motor at its full current rating without breaking a sweat (batteries like to get really warm when under heavy load and squeezed into a small waterproof box). Settle for nothing smaller than 8AWG wire anywhere that will carry motor current. Battery analyzers/voltmeters are a must in your system to measure current flow and battery voltage. I burnt up both a 150A and 200A cheap amazon version using a motor that should not have pulled more than 120A. A hall effect style vs. shunt resistor is nice because it does not get hot and if it fails wont leave you stranded. Both my shunt style meter got so hot that the actual shunt desoldered from the circuit board (multiple times). Also spend considerable time thnking of how you will keep things like the esc, motor or maybe even batteries cool. Heat doesnt have anywhere to go inside a waterproof box unless you give it a path out.
Overbuild everything. Like the electrical system, efoils are a demanding application and if your board works it is seeing lots of power and stress. Weight is important so dont get too carried away but remember if it’s between an extra 1/2 pound of reinforcement or your mast getting ripped off, you can always save the cheeseburger for after your ride.
Cheap is actually expensive (mind-blowing, I know)Buying an oversized ESC that you know will handle your current loads easily is ABSOLUTELY worth the extra cost. If you don’t have enough money for the better component, wait till you do. Don’t buy the cheap stuff. It will save you so much money in the long run. I probably have $1200 in my current setup but have spent double that of the pile of black, stinky motors and controllers and other parts in my trashcan.
I have tried 5 different motor setups and concepts up to now and this is the first one that I feel pretty good about. Here is my setup:
-Reshaped standup paddleboard cut down to a 5"6". Pacificmeister style recessed battery box.
-Andersson Foil. I think the model is called the magic carpet. IDK it was really cheap on ebay a couple years ago. Totally flat garolite foils and one piece aluminum mast and fuselage. Surprisingly seems to work pretty well (see below)
-Flipsky 65151 120kv motor half-filled with corrosionx
-Flier 400A ESC (Awesome customer support but sadly I cannot recommend with this motor. Get the flipsky or swordfish or even better the vesc if you have the budget)
-2x Turnigy multistar 6s 20000mah lipo batteries (series 12S)
-Maytech V2 remote
-Turnigy dual output BEC 5v and 12v (for cooling pump)
cheap 12v centrifugal water pump
closed loop cooling with heat exchangers made from PC cooling blocks bonded to heatsinks. Radiator mounted through bottom of the board.
Amazon hall effect style voltage analyzer/ current meter with color display.
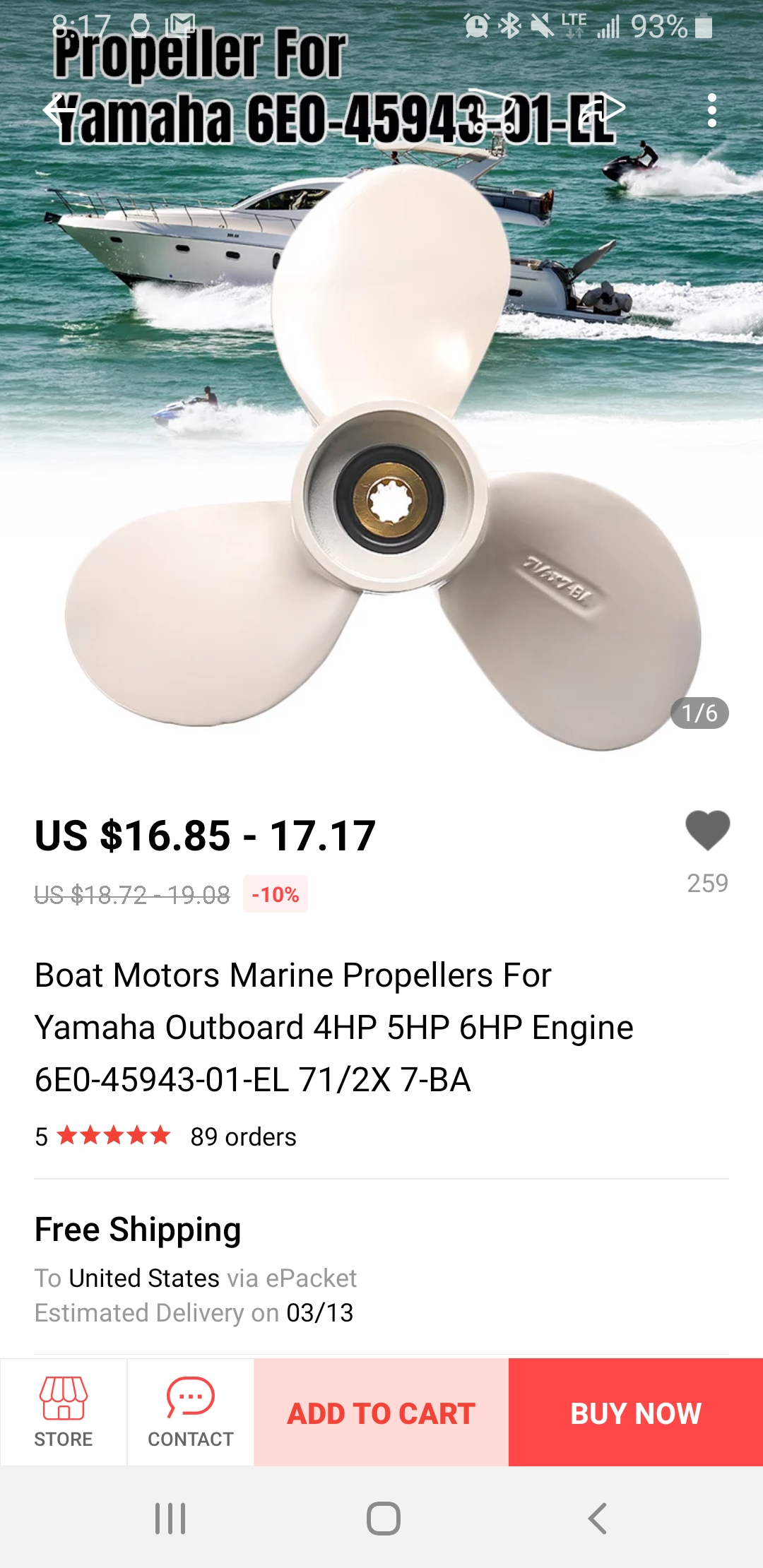
-Solas prop
-harbor freight “apache” waterproof case
I have ridden it 4 times now with success. It has plenty of power and throttle response is very smooth and predictable. The foil took a little shimming to get right but now it feels pretty spot on. I dont have any speed data but I’d imagine I can get up on the foil around 8-10 mph and a top speed around 18mph or so. When up at a comfortable cruising speed (maybe 12ish mph) I am pulling about 47-52 amps which I am really pleased with. Id like to figure out how to get more runtime out of it. Currently, I am only getting like 15-20 minutes of ride time. Once I get down to about 44V, the motor starts having weird sync issues and runs really rough above 30% throttle (i think i blame the FLier ESC). Not enough to get up on the foil but at least enough to ride on my stomach back in. I have my LVC settings on the ESC at 3.3 v per cell and 40% power. I think that might be what’s causing this so I may try the soft cutoff feature to see if that fixes it. If it is the LVC causing this behavior I might try running a lower cutoff voltage to see if I can get closer to around 40V before the cutoff. I also sometimes have sort of odd motor startup behavior but it usually doesn’t cause any problems. Other than this everything else seems to be working well (knock on wood). I think if I were to start this build over, I would not go with the Flier ESC as it doesnt seem to work super great with the flipsky motor. I may try the flipsky esc in the future.
Looks like me holding off a year might have saved me some of the headaches.
I hope you get the issues ironed out on low voltage.
Ive opted for the Flipsky 65151 120kv along with their Seal 300A ESC. (unsure how spalsh proof this is but im expecting to need a box for it)
I would like to know if any data like temps or RPM can be sent to the maytech v2 remote with the Seal 300A
Im also wondering if you can configure the remote like the lift foils where you can just nail the throttle 100% while getting up and then cycle through modes to increase speed. I imagine holding the throttle accurately while trying to get up could be a challenge. The documentation on both the Seal 300A and maytech remote is a little sketchy from what i have seen.
You can only send battery voltage (through a low res bar graph thing) and motor RPM back to the remote. RPM is easy. you just tie the RPM sensor wire on the receiver to one of the motor leads.
The Maytech remote does have a cruise control feature but no power limiter like the lift foil. Im not sure you would want that though as being able to modulate the throttle really helps you stay balanced. I find that I am almost constantly adjusting throttle to maintain level flight in addition to moving weight off or onto my back foot. I have ridden the lift foil as well and the power limiter is still pretty fast even at a low setting and I didnt ever feel the urge to just hold it wide open since throttle input can really help balance.
No net yet, I just started! ive been at school in charlotte. I just finished a custom cnc machine so im gonna work on building a good hydrofoil first, while I save up some money and wait for peters motor. I have an old janky wooden kite foil I made a few years ago but hopefully with the aid of CAD and some precision I can make a better one. If I come up with a good design I could make one for you too.
So ive been having a ton of fun with my foil project for the last couple months. I havent been able to ride it as much as I thought I would but probably have 10-15 sessions on it. Battery run time is 30-35 minutes with 2x turnigy 20000mah 6s batteries in series. I havent had any issues with the motor or speed controller yet. I have had problems with the maytech remote. I think its pretty well know on here by now that the waterproofing is prone to fail. At one point my remote was not working even after a month of drying it out indoors. I was able to save it by putting it in the fridge for a few days. I got it wet a second time and yet again, a night in the fridge saved the day! I now ride with the remote in a ziplock bag.
Unfortunately, on my last ride my batteries bit the dust. It was pretty normal for these things to get really hot (about 130F) by the end of a ride and the batteries would even get a little puffy. The puffyness was usually temporary. These batteries have a 10C rating but in reality I dont think they are anywhere even close to that. Im pulling like 50-60A average with max of like 120A from my flipsky VESC 200.
I guess its time to take a stab at building my own 18650 pack like @Flightjunkie. Because I use these batteries for my ebike, I would like to keep the same form factor as the turnigy batteries. This would also allow me to use the same electronics enclosure im currently using on my board. I think i can build 2x 6S8P packs and keep each within the same dimensions as my spent turnigy packs. To do this though I have to get a little funky with the cell layout. The picture below shows what im thinking. The 6 cells of the same color would be in series and make up each of the 8 parallel cell groups. If I stagger them as shown in the model instead of putting them in straight lines, I can fit all of these cells inside of a box that would be the same size as my turnigy batteries.
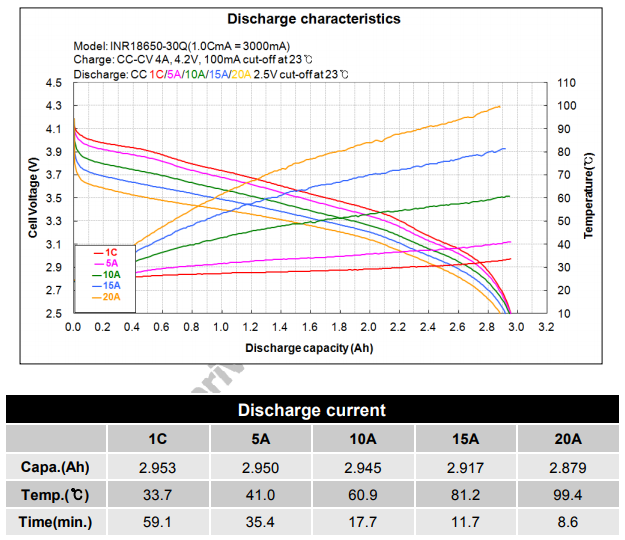
If i use samsung 30Q cells (15A, 3000mah), i could get 24000mah per pack at a rating on 120A. I would be running these two packs in series so total would be 12S, 24AH, 120A rating. That would give me 20% more battery capacity compared to my 20AH Turnigy batteries. I have a couple questions fro the battery experts though.
Would I be pushing the 120A rating of these batteries with my flipsky 65150 setup? Is this a continuous rating or peak? Is this rating accurate or way exaggerated like the Turnigy batteries?
Do you think I would have issues with heat using this battery configuration? They are probably a little closer together in this config that is they were straight side by side. I guess this is a function of battery spacing for heat dissipation, current draw, and the number of cells i have in parallel.
Can you guys recommend any good BMS systems? 6s 120A minimum.
Recommendations for best places to buy these cells?
Any red flags with this? This would be my first battery build so im a total noob and would love some input from the pros! Thanks!
Sounds like I am might want to skip the BMS. Just read a post about someones van catching on fire! I guess as long as you have a decent balance charger, than maybe relying on a BMS might be riskier than just being responsible during charging and not letting voltages drop too low.
After reading more, sounds like the samsung 30Q is the cell of choice. Anyone know if i will have any heat issues with these cells in 8P and close packed diagonally? My max battery current is set to 100A on my VESC.
I ran 2 6s12p 30Q packs (35AH) and they are get fairly warm. Yesterday I got 35 min or so with that pack while mostly up and foiling… although I have a smaller foil. Looking at my data, I was around 50ish amps going about 16-17mph on foil.
I 3d printed a spacer to keep the cells a little apart. You don’t want the insulation rubbing through and shorting two series rows together since the can on the 18650 is negative. Read up on some battery building. Knowing what I know now after more reading, I would have laid out my packs a little differently, rounded all the corners on the nickle, etc…
Thanks for the input! When you say they got a little warm like literally just a little warm or almost uncomfortable to touch? My turnigy packs that just bit the dust hit like 140F on the outside of the pack. Who knows how hot it was getting between cells! I wonder if an 8P pack might get too hot?
Heres a video from the last ride I had before my pack blew:
Check out the top of this post for specs and pictures. Its some cheap flat garoite foil/ aluminum mast fuselage setup i found on ebay a couple years ago. Cant remember the brand. way better ones available in the same price range these days.
I’ am no battery expert but looked for the same answers for my pack.
120A (peak) means you’re pushing 6kw in your motor which if memory serves is the motor max power. Look here, metrApp from Ackermann using same motor :
I don’t think you’ll be pushing more than 100A peak battery current with this setup, so 2x 6S8P should be suitable for your needs. If you ever need to use more than 100A peak (peak means not continuous), then you’ll probably have to redo your calculations to draw around 10A per cell and stay under 60°C.
You might want to order from Nkon or Fogstar. Fogstar cells are shipped from UK and available with a discounted price for efoil.builders members :
Yeah, I think it’s a bit tricky to find a suitable BMS for our needs. I’ll be interested to know what Lift or Flite are using ? Anyone knows ?
30Q cells are the one used by Lift and by lots of dyer, not only in efoil. They are proven to be good quality cells.
Heat dissipation depends on your amp consumption. 100A continuous means you’ll be running your pack at around 70°C I guess, see curves I posted earlier. Thomas from @funboards.at is building kind of same packs for his electric paramotors, so no problem with this configuration I guess.