I guess probably that why I still have my first swordfish boat esc working even after +250A pics and my heli version burned in 30sec … for current control
for current control
So many ESCs burn because the engine set-up is not checked at full throttle.
The load on the ESC from the clock losses drives the temperature up. The lower the limit, the higher the losses and thus the temperature.
In my opinion the wrong way.
I sometimes fly with 150 € sets (motor and ESC) and nothing burns.
Greetings Frank
anyone interested in the relationship between speed, power consumption, propeller diameter, data logging, rpm limmits for compensation of the voltage drop of li ion packs. as well as creating performance diagrams can look forward to my facebook page (from april). the reason is why in future I will only post it there: in a forum you always automatically have people who always say the opposite, even though they have much less experience on the subject. therefore the treads become long and confusing. in principle, there are actually only controversies between 2-5 people. an interested person doesn’t have much of it. one can clearly say now. is what you write on your facebook page correct? I say so. What is written is documented in the form of live performances, videos including data and images and measurements. whoever thinks something is wrong can simply stop reading. I will definitely not waste the time and justify something and explain again several times that I can clearly prove in a posting. In my main hobby, this procedure has proven itself very well. Best regards
3 Likes
Many esc die not at full, but at half throttle because motor amps are way higher than battery amps at this stage
1 Like
Had this exact situation with my buddy. He was runnin his submarine or whats the word on half throttle, system got pretty hot all the time. When he downsized prop and let motor spin full throttle, system was much cooler. And this is with basic low amp rc controllers.
1 Like
What you mention is correct. However, the knowledge on a forum like this one is built by iteration. So it is normal that everybody who thinks he/she has understood something challenges other members to be proven wrong. It is also a question of “knowledge maturity”. When there is a minimum number of persons that agree, the group is ready to start a new level.
Now, externalizing the knowledge is always possible. But one would loose the search function power. As per the big picture, there’s also a wiki for the ones who want to fix their knowledge while sharing their understanding. The Wiki idea is nearly as old as this forum. As each post is editable, there is no (less ?) controversy. One doesn’t need to have build a nice board (80% of the forum members) to write down a nice Wiki. A good sense of synthesis is the key.
As you are the first one to show an interest to do it, honour is yours, would you create the
“Speed / power consumption / propeller diameter / rpm interaction - Wiki” here ? What this site needs is a shell to publish proven results.
As it is a Wiki, you wouldn’t be alone, to maintain it. I am sure it would create many vocations.
The efoil.builders wiki origins: Why not start a wiki? - Site Feedback - FOIL.zone (Nov 2017)
The new category: About the Wiki category - Wiki - FOIL.zone
The first and only topic: Propulsion Type Overview - Wiki - Wiki - FOIL.zone
3 Likes
That right!!!
They die at half throttle because the regulator’s clock losses put a higher load on it than at full throttle.
If the prop is chosen so that the current does not have to be limited, the ESC also survives.
If the prop is selected too large and part load is constantly in control mode, the controllers boil.
Regardless of that the engine should reach 80% of its idling speed at full throttle in order to achieve a good ETA.
Just as an info.
I have produced about 2500 brushless motors.
Among other things also worked with Torqueedo (Torcman), Kontronik and others.
Greetings Frank
1 Like
So lets look at some real world efoil data and see whats going on. The following data was logged in January while I was on a trip in South Africa. The setup I was using was as follows (if anyone wants pics I can add them in too):
Me: 90kg
Board: 5ft x 60cm x 8cm
ESC: Freefly Arc200 with naturally aspirated water cooling (through nose cone)
Battery: 12s12p (30Ah), Samsung 25r cells
Motor: Maytech 65161 120Kv
Prop: FR 150mm with 6" pitch
Foil: Unifoil Hyper 170
Now for the data:

Firstly it’s important to understand that this motor and pretty much every motor used for efoils hits its torque threshold when propped and in water and therefore can not get the motor up to the same no load RPM it can on land.
Now lets investigate this data…
As you can see there are a series of high “phase current” peaks (you can also see the battery current increases at the same time). These coincide with when I was riding at full throttle and putting the motor into it’s torque threshold. If you then investigate them more closely, as time goes on you can see that for the full throttle runs, the phase current starts to increase and hits higher peaks as the battery voltage goes down. The reason for this is pretty simple: Torque is directly proportional to power. Since P = V x I, as the voltage drops, the motor is forced to take more phase current to hit the torque threshold of the motor.
If I were to move this to a 14S battery all of a sudden, you would see a few things happen:
- Power of the overall system would increase
- This means that the Torque would increase
- At the same 38kph speed, the power requirement to drive the prop would be the same as at 12S and therefore the phase current would reduce (note you won’t be running at full throttle)
- At full throttle you’d see a higher max phase current and a resultant higher top speed.
- The motor would not burn out though as it is still capable of handling these values.
Now onto another very interesting point that has been raised about running at 50% throttle and the temperature effects on speed controllers…
While the speed controller is less efficient at 50% throttle, I don’t believe that is why guys are blowing them up. In my opinion the reason guys blow them up is because they are not adequately cooling them at all speeds.
If you look at point C on the graph you can see that I was running at about 40% throttle for a prolonged period of time and that the ESC was running cooler than it was when I was doing full throttle runs before hand.
Can you elaborate on that?
I understand that if the power keeps the same and prop also keeps the same but just battery voltage rises, the duty will be lower and the battery amps will be lower (U1 x I1= P1; P2=P1=U2 x I2; so if U2>U1 => I2 <I1). So in my opinion you will still need same torque (phase amps) and rpm(phase voltage). Same amps means same phase amps, not same battery amps. Same rpm means same phase voltage, same phase voltage at lower inputvoltage means lower dutycycle.
Other opinions?
It is not the efficiency, it’s the phase amps. At low rpm the motor can draw over 1000A phase amps. This kills every ESC without phase current limit or over current protections.
Torque for a brushless motor is calculated as a constant multiplied by the phase current.
It can also be calculated by the power divided by the rpm of the motor.
Now because power is equal to voltage multiplied by current. Therefore if you increase the voltage but keep the power and torque at the same, you will see a reduction in phase current as battery current.
Now the reason I say that the ESC becomes less efficient is because there seems to be a belief that the more energy is converted to heat at 50% throttle than at 100% throttle.
Yes, T=Km x Iphase
sure, P=pi x RPM x T x 1/30 => T~P/RPM
So, sure P = Irms x Urms, you increase input voltage 12 =>14S. So Pbat = Ibat x Ubat => Ibat gets lower.
Torque keeps same. So from “T=Km x Iphase” Iphase has to be same.
I guess you mix up phase voltage and input voltage.
Phase voltage correlates with backEMF and therefor RPM. So if you keep the prop and motor the same, for same power you will get the same equilibrium (it gets a differential equation as soon as you take the inductance into account, still inductance will keep the same as it is a motor constant, so we can neglect it here) of RPM and torque=> same phase voltage, same Iphase.
Depends on the commutation algorithm, for FOC you got a fixed PWM frequency at the ESC, so the ESC doesnt differentiate between 50 and 100% duty.
But current goes in square to heating. So at low rpm 50% duty will kill the ESC same as 100% duty.
Do the math: Iphase=(Uphase-UBEMF- (L/ (di/dt))/Rmotor
The L/ di/dt makes it a differential equation. With a solution of something like 1-e^(t/tau), so you simply have a ramping effect by the inductance of the motor. Since we are in low RPM and having low inductance motors we can neglect this term and directly calculate the maximum (tau is around 2ms, at 1200RPM with 3polpairs one electric FOC commutation takes ~8.5ms, so after 3x tau you can neglect it with less 5% error or after 5tau with less than 1% error).
So R motor is like 10-30mOhm.
UBEMF directly correlates with KV, so for 120KV motor you get 10V BEMF at 1200RPM
Uphase = Duty * Uinput, so at 14S and 50% duty => ~25V
All put into the formular: Iphase will peak out between 500A (30mOhm) and 1500A (10mOhm). This kills any ESC.
If you instantly go on full throttle on even lower RPM you can imagine what will happen.
5 Likes
Yes, sorry… typing on a phone leads to brain farts, I can see I made the mistake earlier when I posted the graph as well. Thanks for pointing that out.
So I have a bit of a weird one where I have a log where I have seen a spike of over 500A and the controller hasn’t actually popped. It’s still perfectly fine:
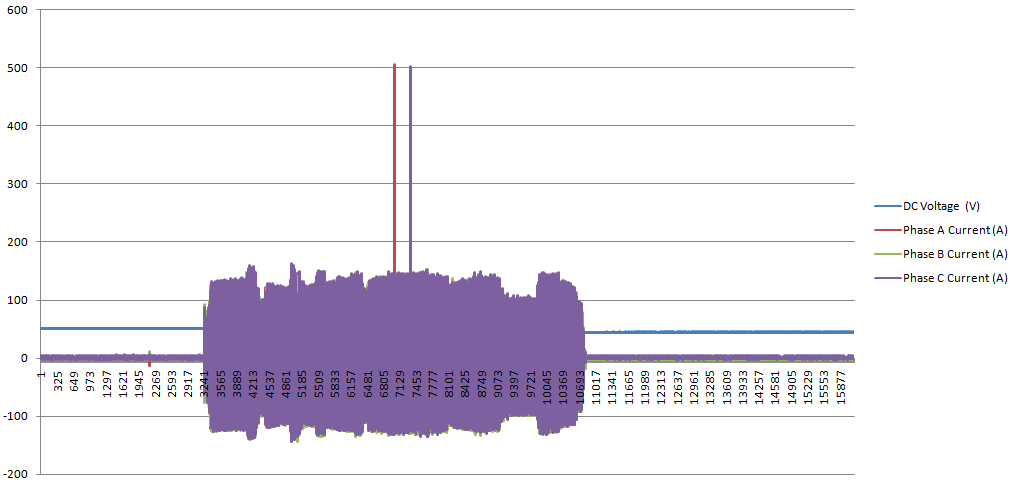
The ARC200 does have current protection, but I would think I shouldn’t have seen this then.
What is the logging frequency (like for how long was the spike)? Little strange that there are 2 spikes.
But since the controller doesnt reset/fail afterwards, it could also be an import/transmission error.
Because e.g. the VESC has a fault stop time after seeing anything above the “abs overcurrent limit”. So the controller resets. It could also be a sensor outlier which has been filtered by a software lowpass.
Maybe you show the exact data points before and after the spike and also not only currents but also duty cycle, D-current, I-current, (e)rpm and the voltages.
If current and voltage go up at the same time, the measurement protocol is worth nothing.
Either one or the other 
Greetings Frank
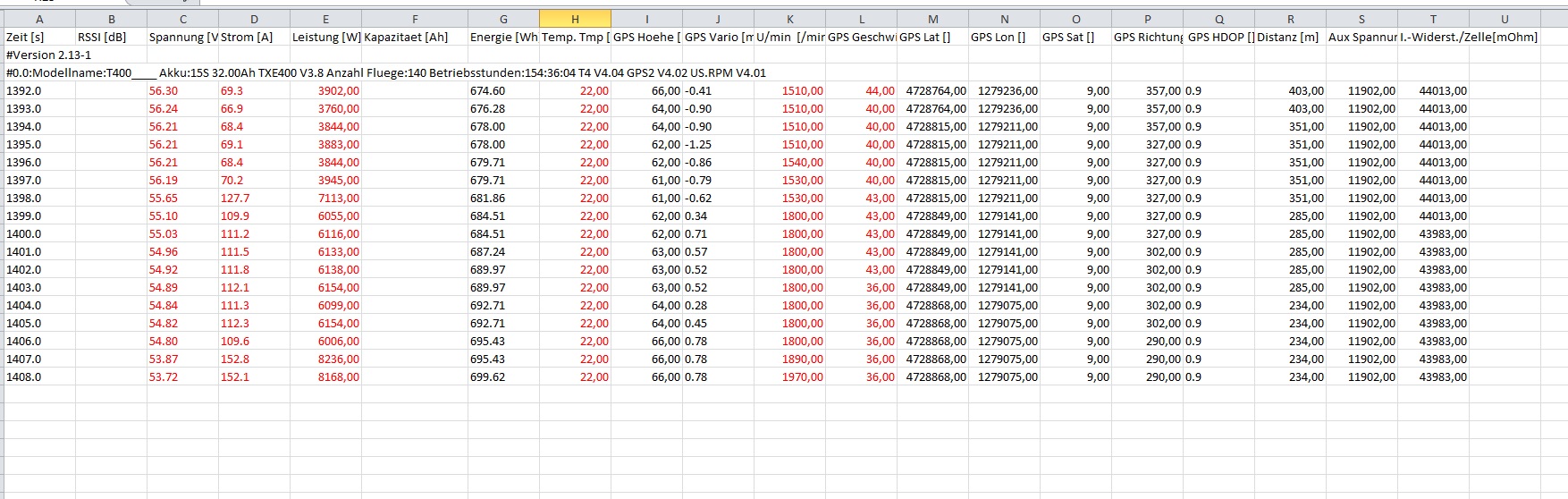
here is an example of how I “work” when I tune drives. the example is from flying, at e.foil I do the same with the difference that I also do a live monitoring that also shows me the phases of current peaks. logged in 60 hz (1 sec.) saved as CSV format. I marked the areas that make sense for e-foil in red. the temperature is the battery temperature. That is the reason why I have never burned a setup " I see all the data live during operation. So if I use a propeller that is too large, I can cancel it early. The selection of the propeller is so easy and shows me exactly the performance in the comparison of power consumption and achievable speed.This is how a performance diagram arises.I wanted to say if some think you have to explain to me how brushless systems work
I see all the data live during operation. So if I use a propeller that is too large, I can cancel it early. The selection of the propeller is so easy and shows me exactly the performance in the comparison of power consumption and achievable speed.This is how a performance diagram arises.I wanted to say if some think you have to explain to me how brushless systems work 
the efficiency is then shown in flight in grams of thrust per watt. at e-foil I do it in speed / watt.
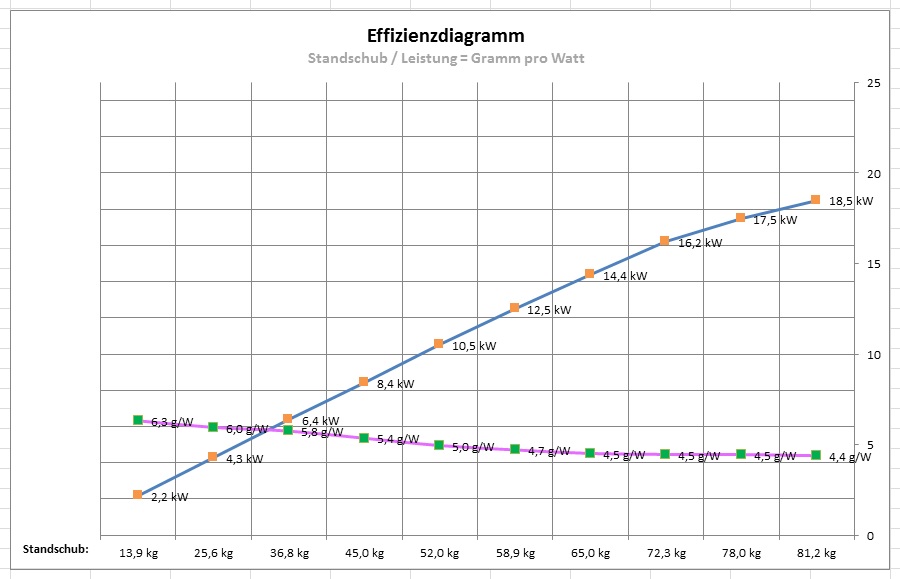
of course you can also compare different wings and setups. e.g. 10 S setup with large propeller, 12 S setup with medium, highspeed 15 S with small racing propeller etc. because the speeds are logged it also shows how efficient eg. a setup is when starting off or in cruise mode or at top speed. these values are not easy to calculate, so i do live monitoring and take a look at my pc and know exactly what the truth is. then it is important to find a good compromise that makes foiling fun. do I want to top speed or a lot of thrust from below? everyone has different preferences. that’s why i milled 7 new proellers for myself at the weekend for easy changeover at the lake. I then give the propellers names like fun, eco cruise, topspeed, classic, beginner training, etc. changing the propeller is quick.
9 Likes
Got any pics or specs of the props? Are they on your facebook?
i will show pictures on facebook in april. i don’t sell the propellers. if someone is interested in getting the dxf for a cnc router, i can provide it with the respective performance characteristics. Maybe I’ll make a form of the best propeller and make a small series in carbon prepreg and carbon filler with cutted carbon parts in the resin. just take a look. when flying it works very well. a water propeller is a “child’s play” for comparing an air propeller. You do not need to consider strength or centrifugal forces. that’s why there are plastic water propellers on the market. https://www.youtube.com/watch?v=zw7sZ72JQxY
4 Likes
When I was building drones years ago, I got an average of 5g/w. I was expecting a higher effiecientcy for bigger props like you use on your paramotor. The props that I used where 12-18inch in diameter. Drone weight range from 4-20kg.
Great work on the props, realy a master piece!
1 Like
so the maytech 65152 has two different shaft options depending if you go for 100KV or 120KV
would it be better to go for the splinded shaft version or with the screw shaft one?
KR and thx very much