Sorry, I’m looking for something different than just SUP hydrofoil - I want to test a proof of concept of active height control using digital control system. It will actively control the wing angle of attack to keep the boat stable regardless of weight balance, at the same level about the water and damp the waves.
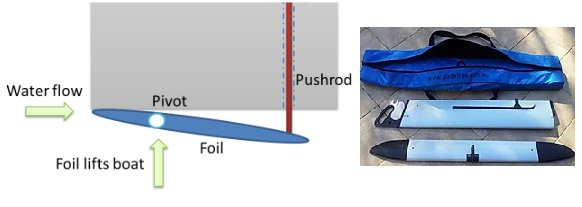
There are three hydrofoil wings of same size. Each wing will have a servomotor(similar to RC cars) which will push/pull the rod, which will change the angle of attack of each wing.
I have concept for all electronics on board (sensors, CPU, etc) but need some hint on mechanics - while mast looks to be available from Kite surfing, where can I get the wings? and how to connect them?
Are there any ready made solutions for wings available?
Yes but designed for a dinghy so expensive over dimensioned for a SUP board. Therefore, something similar c(sh)ould be downsized for efoils:
Don’t know whether a waterproof servo could be strong enough to replace a mechanical surface sensor.
Thanks for the information. That’s look very interesting.
Actually a hydrofoil SUP going to be a prototype, as I plan to scale the system up to a boat size. So price is not so critical.
Taaroa iUP from electronics point of view is exactly same thing, what I plan and to be honest - no AI is required to do that. It’s just couple of sensors and feedback loops over controller.
I’ve seen Moth flaps system, it is OK. But it creates drag, which I’m trying to avoid.
The glidefree system is the demonstration that height sensing can be 100% mechanical. However, such a mechanism can be harmful and fragile in case of fall on the mast.
Yes. All these Moths and other riders with sensing sticks are example of primitive proportional feedback controller.
If you do it electronics you can and I and D control, some adaptive filtering, velocity dependency, gyroscopes and all this at moderate cost.