The oil I’m using is 100% Natural. In case something goes wrong, I don’t want to pollute the sea where I’m testing the Surfboard =)
But thanks for the tip !
I’m sure I can find a better oil, but it’s usually composed of chimicals and it’s not allowed for underwater use in France.
3 Likes
Its great to see that people care much of nature and always keep it in mind!
1 Like
If you added something between the outer bell magnets, you should see less drag and less power used with the oil inside. I’m very interested to see how this goes…
Yes, I’ve thought about it too. I think most of the drag comes from the holes on the rotor that are used for cooling when used “the normal way”. In our case, wee don’t need these holes anymore.
Some new outrunners come with “sealed” rotors. I’m using one for my electric longboard and there are no holes. Unfortunately, I couldn’t find any rated for 4000W 12S and 100Kv or less ! But maybe someday !
For now let’s see how this goes.
I see, it becomes tight with smaller motors.
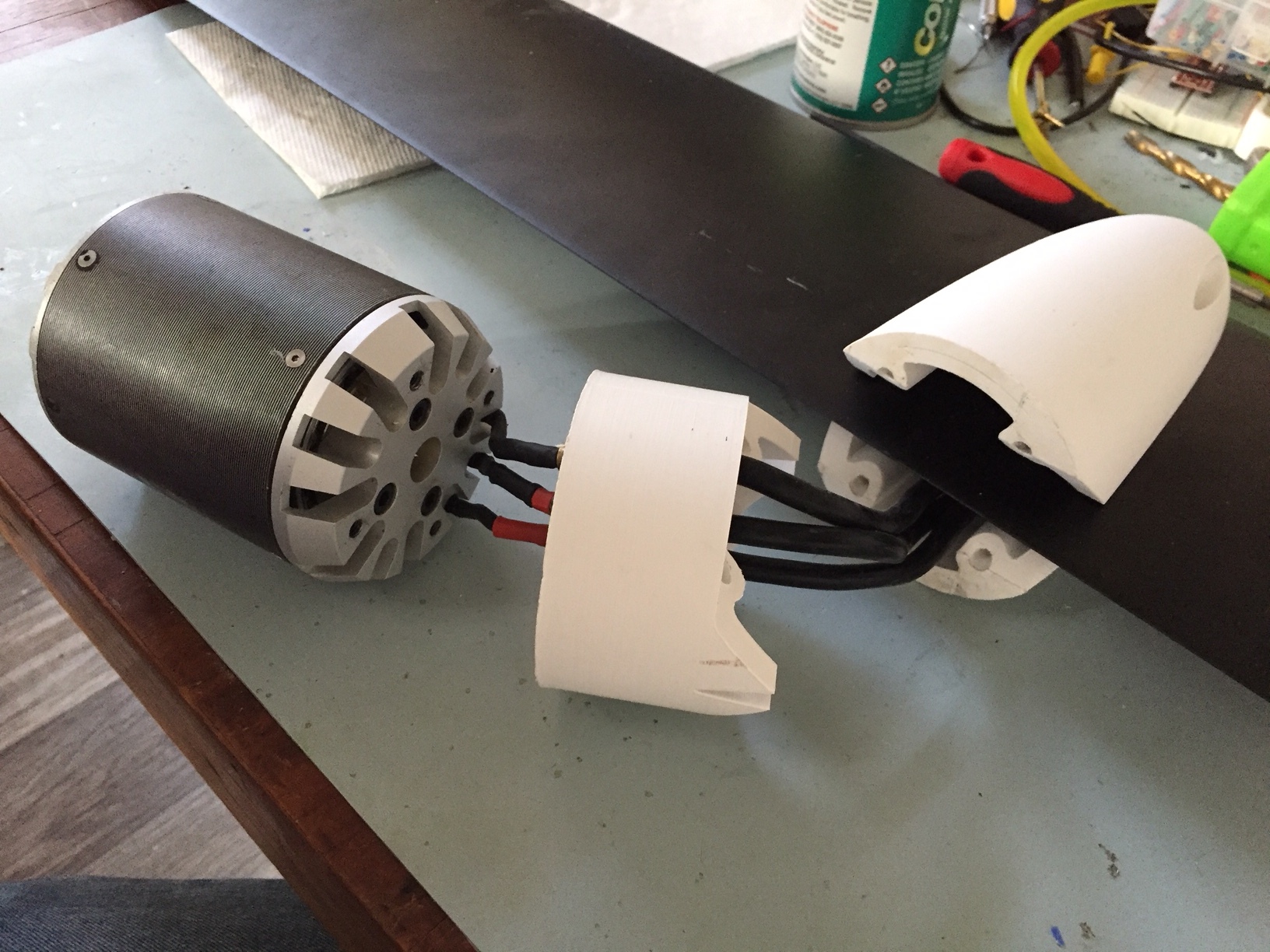
mine is 80mm diameter.
plenty of space to work on the cables / motor when it’s open:
then tuck the wires in. (not the final assembly yet, they’ll be insulated  and i have a piece of plastic to avoid the wires rubbing against the trailing edge of the mast.
and i have a piece of plastic to avoid the wires rubbing against the trailing edge of the mast.
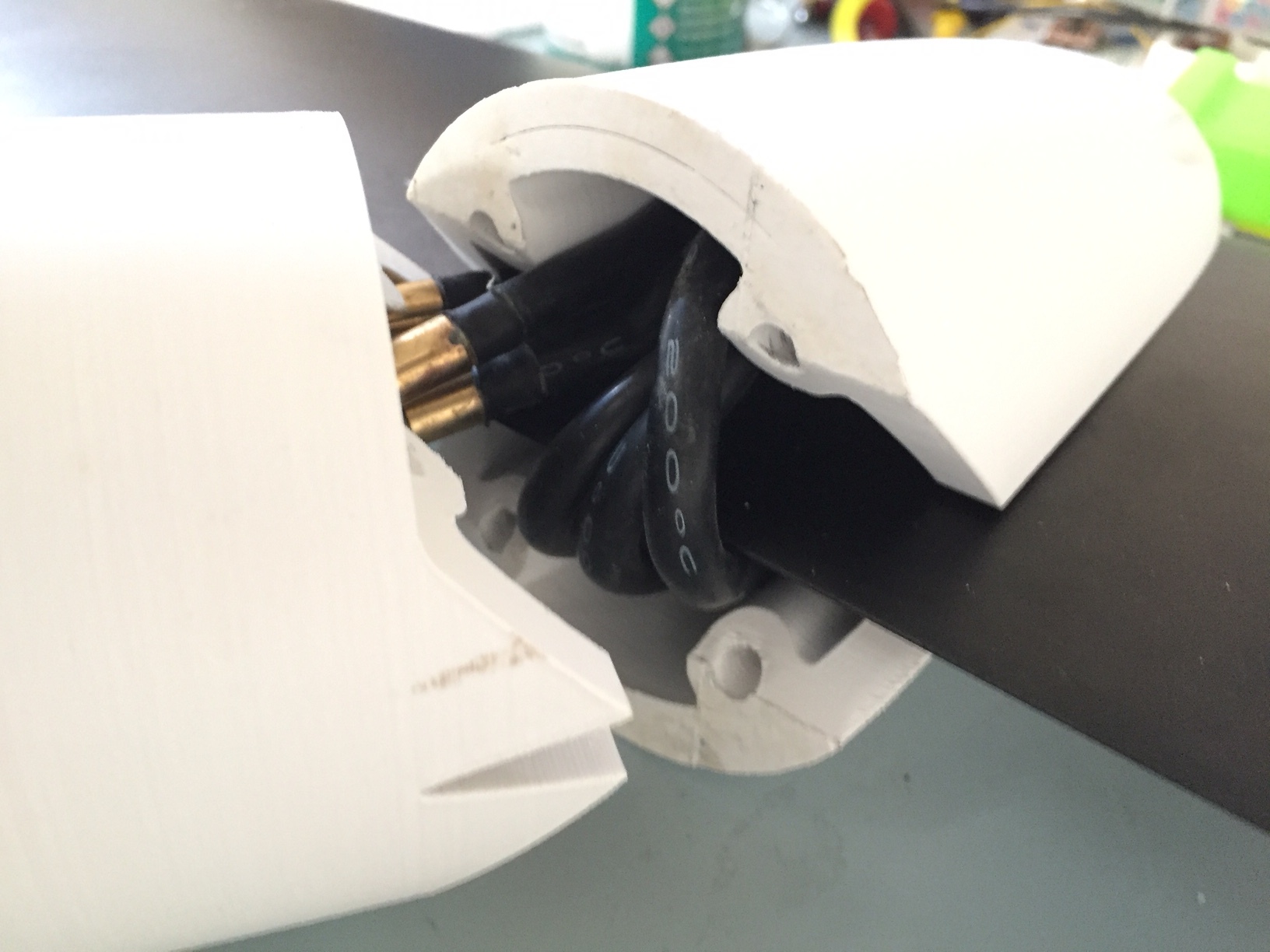
and finally compress all with the 4 screws.

6 Likes
This is a very interesting idea for a joint project. I would help optimize the propeller (made of plastic and metal). But all those interested should use the same engine, the same bearings and other parts of the propulsion system. It would also be appropriate to create a new topic for this project.
What do you think, is 4Nm and 2200W enough to get 25-30kg of bollard thrust? With a 50mm hub. If you think its too weak, we could fall back to 6384, delivering 5-6Nm.
This is a very clever setup. Do i really need the service loop, or could i draw the insulated phase wires forth and back through the mast? Is this a no go?
Well, i guess both are options, it depends on how you manage waterproofness at the top of the mast:
In my case, the top of the plate is doing the seal with the bottom of the board, as the wires go through, they are sealed with silicon, so not moving at the top.
The wires are too stiff to move at the bottom if they don’t move at the top, and as i want to keep the water out of the mast, the exit is sealed too… so, as my wires are not moving, only option were:
- opened hatch on the side of the pod to access the wires and waterproof the connection
- service loop to waterproof the wires outside and tuck them in.
The hatch would be an elegant design but would weaken the pod, and as the 80mm diameter motor leaves lot of space: service loop!
Regarding moving the wires if you can afford to move them at the top, you might want to cover the edges of the mast holes… even filed down, i’m scared bare aluminum would attack the insulation …
I only specialize in research and development of propellers. I have no experience with hydrofoils. If there are e-foils (commercial) that have direct or indirect drive with motors min. 4Nm, so this engine must be enough for us as well. I only have 62 kg, for me 4Nm should be enough. Such a low torque requires a very good propeller, preferably made of metal (high quality aluminum or titanium). Plastic propellers should have a lower thrust (and a slightly smaller diameter).
Today i measured 33kg static thrust at 2400W with my 6384PG 100Kv, 12S, VESC and a prop 7 1/4x8" cut down to 136mm diameter in a duct, everything mounted on a windsurfboard.
I need a datalogger for the VESC. I got to measure the motor current. Something still is wrong with the nano-x remote.
5 Likes
Do you have a link for that one? I just can find 7 1/2 x 8
How about HM-10 + ESC Monitor App?
1 Like
Wow! thats impressive!
7 1/2 x 8" is Yamaha standard prop, good quality. I would like to test also 7 1/2 x 9" but do not know where to buy for small money… The higher pitches are rare.
Is there also an offline SD card data logger? I am not sure what to use.
I would be really intersted in the motor current/torque you are pushing.
I‘m not running the bluetooth module @Giga mentioned above but I have a Wifi app running on my phone with an esp8266 logging all data independently on the board. I can log all Vesc Parameters for a few hours with 1 second interval locally on the 3€ esp8266/arduino. The code is still messy but it works and is really simple hardware wise. I could send you the code or the finished esp8266 if you want, but it‘s still early prototype. For watching live data while riding I use one of those waterproof camera bags wich clamp down with screws. It floats and I can even control the throttle with the phone. Just don‘t get water on the screen or the throttle drops to zero.

1 Like
Maybe you can sell or lend me such an esp8266 ? That would be great! I will post the data in the forum.
yeah, but the 7 1/2 usually have a spline shaft and the 7 1/4 have 10mm bore. That’s why I am asking for the 7 1/4 x 8.
depends what you mean by offline, you dont need to have internet connection. It is just a bluetooth-bridge to the phone. So you must have your phone with you.
Where do you save the data? for me it is about 2MB/h and the ESP does not have that much storage, so do you have a SD-Card or something?
1 Like
YIf you are willing to take a waterproofed phone (maybe in the bag like I did above) with you, the bluetooth module Giga suggested is much easier.
I could send you my solution, but I dont‘t want to fully publish it as, although it was some work to get it this far, it is still not user friendly. One could accuse me of beeing too lazy to write good enough documentation, i.e. readable to non-engineers.
@Giga:
It‘s only an ESP-12-F / esp8266 / arduino. Mine has 4M internal storage. I initially wanted to run with an SD Card, but this way is much more compact. It‘s just the module connected to the Vesc by power/gnd/rx/tx.
The phone loads a small webpage from the esp via wifi. This wifi is also provided by the esp. The phone starts the logging and supplies a start time to the esp. This way I can sync the gps track afterwards with the log file via the timestamps. After starting the logging the esp runs independent. To stop the logging you connect with your phone again and download the binay log file. I store the binary data on the esp to save space, because I chose to not have an SD card. I then transfer the file to my pc and decode the binary data to a spreadsheet with a small cpp program.
The wabpage also displays a huge slider input on the phone. I use this to control the throttle during tests, if you let go of the input, the motor stops.
On the webpage there is also a table with live data from the vesc, so I can watch all temperatures while on the board. I know I could have had this with bluetooth and the app you mentioned much easier, but I wanted to try those wifi modules and independent logging. Maybe I just personally hate bluetooth 
If someone wants to collaborate on this logging thing, I would share the code with you.
1 Like
How robust and responsive are those features?
I am working on a similar solution: Ardunino at ESC with BT, GPS-Module and SRX88; Remote with Teensy and Display, BT, SD-Card and STX88. Normal operation: Stream bidirectional over BT, but if something goes wrong (50ms timeout) throttle override with 433Mhz (SxX88-Modules).
Logging of ESC-Data + GPS-Data in CSV (timestamp over GPS) for usage of Cube Archive (simple analyzer). The idea is to also to download the data from the remote via BT. But that isn’t implemented yet. Also I am stuck with the mechanical design around my display…
2 Likes