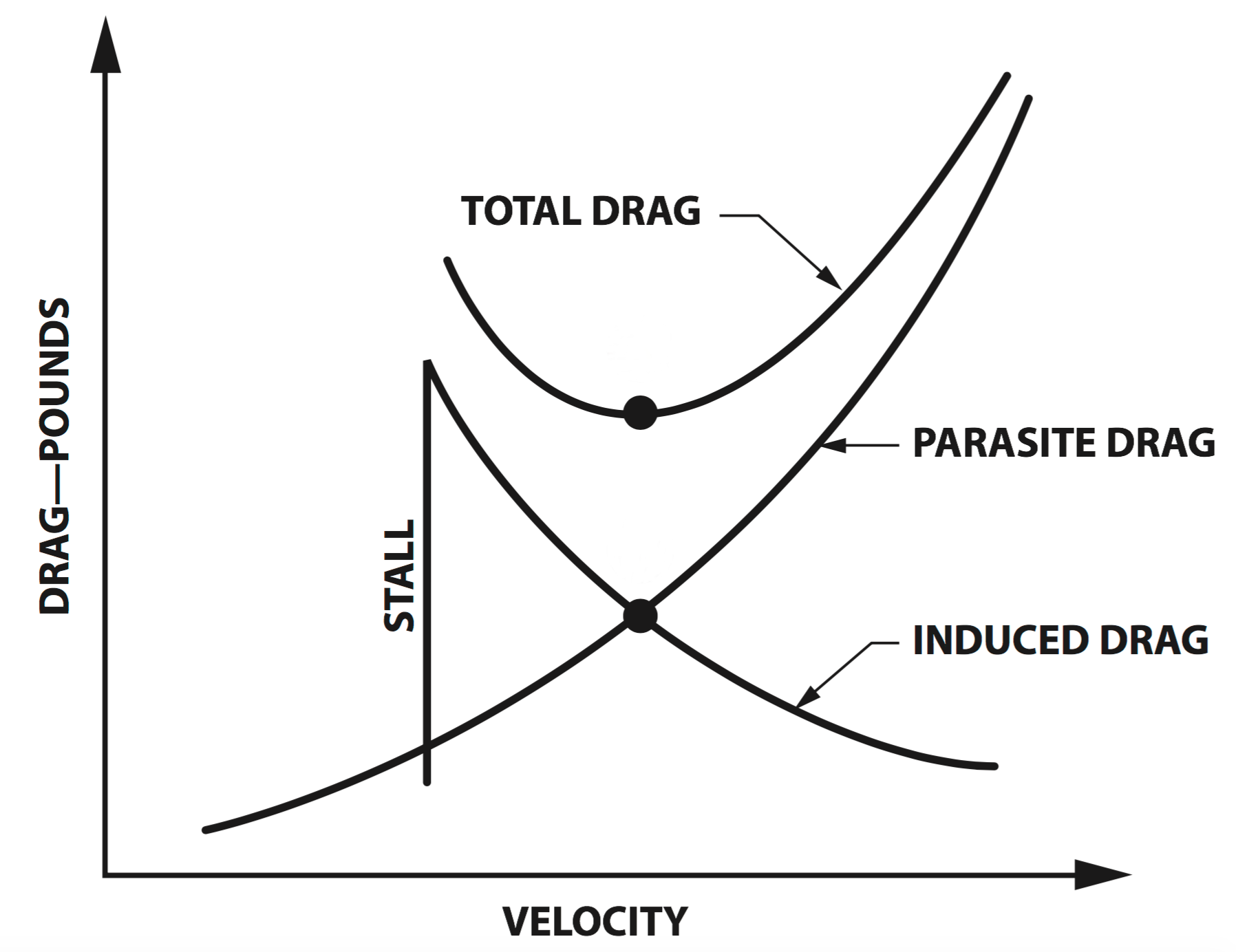
… there should be an optimum for multiple wing sizes. The main drag we are fighting at lift off speed is induced drag. Here is the are the drag shares versus speed:
Lift Coefficient ~ Angle of Attack (as long as we do not stall, this also depends on the airfoil selection)
also:
Induced drag ~ 1 / aspect ratio → we need to have a high aspect ratio (slender wing)
I think one little wing operating at high Angle of Attack (–> high lift coefficient → high induced drag) might have a drag penalty. All wings should have similar lift coefficients. We also need aspect ratio, so the second wing for helping lifting up the foil should not be too small. Calculation/Optimization for this can be done using XFLR5
… I am looking forward to posts of someone, who tried this…
Hi @flyingchris, Thanks for sharing your knowledge with us! Here is a link you may be interested in about a hydrofoil boat with a large main wing that retracts and allows a smaller wing to take over. The basic idea is the same as what you’re talking about to get the boat out of the water with less power.
Also, here’s something I learned recently about an improvement to the elliptical lift distribution where it should actually be a bell curve to reduce induced drag. This was discovered by a NASA scientist. I hope you find it interesting. I’m curious what you think because of your experience in aerodynamics.
Hey Chris, don`t take all the conclusions from aerodynamics into hydrodynamics. Pay attention that we are operating with surf hydrofoils at Reynolds Numbers of about1-400000…and not at Reynolds numbers above 1 million most profiles are made for:wink: Even most of the big companies kitefoil designers walk in the dark at this point:sweat_smile:
On the other side even a flat board does elevate at a certains speed. But if you want the best in regards of performance, yes a good front wing is necessary…
And for the prop design, always keep in mind… cavitation starts around rel. velocity of 14m/s…
The motors maximum Ampere is 93A. At 11km/h we would get 3500RPM, which would match 10Volts. --> Power: 930W which should be enough when the board and propeller are selected having high efficiency in mind (?)
There are two problems: 350KV means no load RPM, so at 10V you might get 3500RPM only without prop. The real RPM might be up to 1/3 lower (assuming 10V are in the voltage range of the motor, it could also be that a 130V rated motor doesn’t even turn on at 10V), and the second: you can’t calculate like, 10V * max amp => maximum power. The motor draws up to 93A at a certain RPM, load and voltage. There is a curve or matrix for every motor for those parameters in dependence of each other, similar to the graph you started the topic.
@Gliderpilot thx, very interesting “flying samurai” video. Supports my hope that our small motor will do the job.
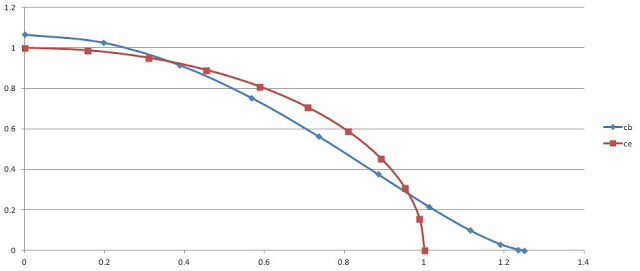
About the bell shaped lift distribution:
The big disadvantage of that is the larger span needed compared to the elliptical lift distribution.
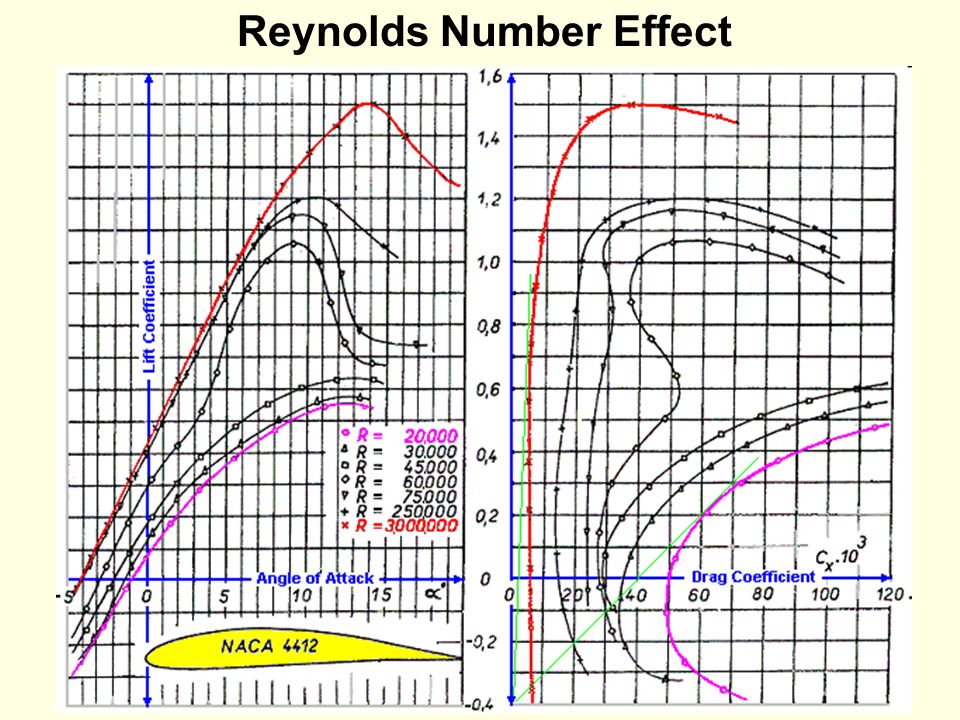
Second issue is that the lift near the tips is reduced. It is usually better to reduce chord here, rather than applying more twist. Here we have already the problem, that we get lower Reynolds numbers (Re=Speed * chord / kin-viscosity) near the tip, which decrease airfoil performance (less max lift and more drag). If we lower the chord here further, we get even lower Reynolds numbers, and thus less performance. I think the bell shaped lift distribution might be feasible for some purposes, but maybe not when we deal with small Reynolds numbers.
Here is a picture showing the Re-Effect (drastic example). At small Re-Numbers there is a larger performance drop than for higher Re-Numbers when chord (~Re) is reduced.
Here is an update on the fuselage. We probably oversized its stability a bit. The initial idea was that we need a wide connection, because of the larger wing span. Furthermore we have two mast positions (3 holes for 2 screws)
Did you hear about a “Gurney Flap”, they are used by race cars to increase the pressure of the spoilers. Airbus now uses them to have an adaptive wing/ lift control during the flight and takeoff (usually you use the “real” flaps for slowing down while/after landing by destroying the laminar flow).
It’s just a tiny angle at the end of your wing profile. Gurney Flap
Swiveled the engine and controller housing. Gap will be very small. Inner diameter of tube was orderes to be 51mm. Now it is 50.5mm. The outer diameter of the outrunner is 49.5mm… we will see if it fits when everything is being assembled.
Decided to put the controller in the tube, hence the tube got very long. 10cm for the engine 15cm for the controller and caps (planned YGE caps 5, due to long cable)
It looks like we’ve both started hydrofoil projects with the same goals in mind. My goal is to power out and catch storm waves as I imagine powering across a flat lake will get boring fast. I find those sit down jet ski’s boring after a couple minutes and certainly doesn’t feel like a “sport” I’m also designing a similar project and have done several test with varying degrees of success and will have my build up here soon. One comment I would make is I don’t think you need to get crazy worrying about board drag. My only goal there is to have the board as small, light and stiff as possible!
Here is the current design. There are two tubes, one for the controller (and the cap5 for compensating the inductivity of the long cables) and one for the engine. The one for the controller will be shorted later soon as I know how much length is really needed. I hope that this controller fits inside:
yes, the Graupner Speed 200 ECO runs on 11-19V, nominal is 14.8V. So I decided to try with 5S. I have no experience with these motors, but I hope that if the cooling (by oil) is fine, then it will be ok with 5S.
Looks nice, hope it works out well for you.
Are you water cooling that with rubber tubing or using the large aluminum tube as a heat sink?
That ESC seems really small at only 120A and using 12AWG wiring. It’s going to run hot, be sure to put a breaker between ESC and Batteries to try and protect batteries if things overheat and meltdown.
Loved your post! Are you still using this forum? I’ve done a foil design addin for Fusion 360 and I’m looking for an engineer like yourself to check if it looks OK…
Hi Chris @cnd,
the screenshot of the plugin you shared looks very promising
I studied mechanical engineering with a focus on aircraft systems and work as an power plant engineer in the overhaul business.
That beeing said, I’m not an expert on aerodynamics and propeller design but have a decent understanding on what’s going on in general.
I’d be interested to try it out and provide some feedback. Is the plugin available yet?
Cheers, Nik