Hi guys, just new to this conversation,
Just been thinking a lot about wireless controllers that from what I have seen out there and people building a dedicated efoil controller.
Amazing work guys!~!!! great stuff.
Some functionality I would be looking for on an efoil would be…
A cruise control and set/ resume function much like we see in cars today.
This would maintain a constant speed and help with stability on the board.
Let go or Take your thumb off the grip…and it will kill the cruise control.
I see some electric skateboard forums asking for the same thing on their controllers.
Also maybe not just for the novice,… a gyro could be added to maintain the level flight between the nose and tail of the board and would be connected using a flap on your fin controlled by a servo and connected by one of your AUX channels on your RX, a gyro can be the master control of your stability no mater your speed.
As some of you speed freaks out there have said…if you go to fast…the propeller wants to come out of the water.
We have been looking into a gyro for a stability pitch control. Very minor few degrees ± to counter any little forwared/backward shifts so you done pop out Of the water or Dive. We are building part of this feature direcly Into our jet drive system. Not sure how well it would work overal, you dont want it your riding ocean waves, but rollers and flat water could be awesome to flip the switch to Reduce pitch sensitivity and hold altitute when carving turns.
Altitude control would be also very helpful. For low altitude height control, ultrasonic transducers are used in drones. I think the Parrot quad drone was one of the first drone models to incorporate this ultrasound technology succesfully several years ago.
Altitude hold is probably more important/helpful than level hold to make riding an e-foil easy.
Explanation of pricing background. Hydroflight is a super small industry, yearly total sales of units, globally, across all manufacturers is under 1,000 units. So every product has to be developed, tooled and produced to function within that reality. Remote controls for the jet ski unts are a fraction of that number. Items like the remote and the carbon fiber boards for example, are all built by hand in low number series.
Two additional factors on the pricing, the market has established a price with two competitors and there is no room for a race to the bottom which would kill future development and risk cutting corners. Secondly is the wholesale, retail margin required. There is always a difference between what you can build your self and the component + time cost and the added structure of supporting dealers around the world with a reasonable (and expected) sales margin.
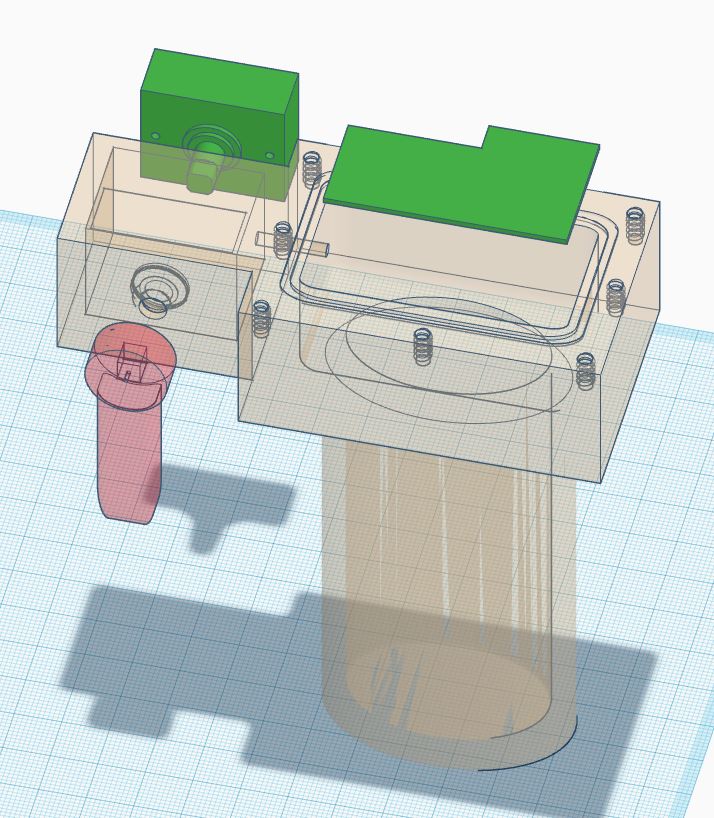
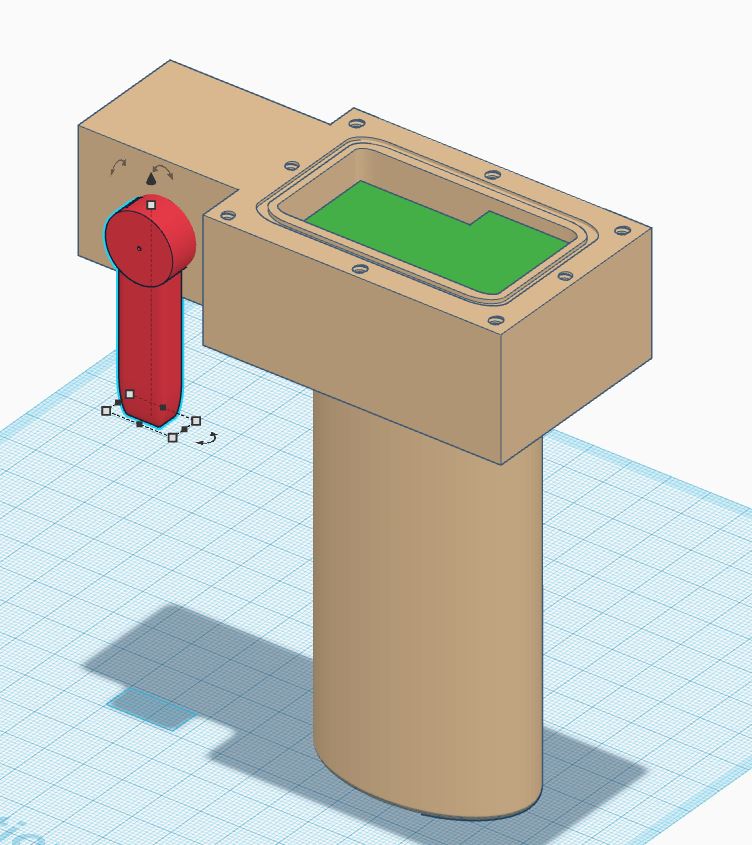
All of that being said, we love open development and for the industrial design part we are sharing these designs with no restrictions hoping that people can adapt or be inspired by the images.
I was looking at adding a ultrasonic transducer to control height, same has on some multihull foiler, the price is quite steep (300 eur for the one bellow) and the signal coming out (0-10v) has to be smoothed to remove the uneven water surface.
@pacificmeister have you considered the waterproof bag set up you see for rafting? The kind that you wrap the end a few times and clip. It could be make of more flexible plastic. Those blue gloves tear easily. At least try the green version. Another thought is to make a bag out of the shrink wrap they use for boats in the winter.
Lastly if you just need to press a button the go-pro housing buttons seam to be water proof??
Great link Clarin, many good innovations on the Moth Foiler that may be applicable to our e-foils. In particular, I like their wing construction and the “hinged flap” main wing.
For the ultrasound, many of the FCBs (flight control boards) for quads/drones have these built in and integrated to the controls…along with gyros and accelerometers. With a bit of firmeware modification to one of these boards and you have your efoil height control system.
Ulstrasound module for less than $1
A few of you on different threads have been talking about the remote kicking out intermittently. We found that several ESC’s stops the motor if a signal is lost from receiver for 0.1 of a second which stops the motor. If your transmitter does not have the fail safe to turn your motor off if signal is lost, the ESC you get should have it, but make sure it does not kill the motor for 2-3 seconds because 0.1 second is way to short and a simple hiccup in your transmitter will trigger the motor to stop.
As stated above wireless throttle needs to be tolerant of cutouts and or brief interference in the signal.
There are situations where the motor has to be shut off immediately. Off axis, flipped, safety leash pulled, other situations possibly yet to be determined.
Both of these will need to be programmed into the control software.
The Flytronics jet ski remote control has a “safe fall” mode, when no signal is received after a short interval, the power is ramped down to idle.
.
I agree, it is important to have functions that prevents unwanted behavers.
The current DIY controller has these functions programed in to it.
Slow acceleration in all cases to protect gearbox failure.
No reverse (even though it is useful in some cases.)
Motor powers down after 1 second signal loss.
Very short signal losses do not affect the motor speed.
You must hold down a Deadman’s Button to use the throttle.
Magnetic leash function, (reed switch and a magnet)
Able to cut the power form batteries with the remote.
LEDs indicating the remote power status, soon also board battery status.
The acceleration curve is tested, and optimized for our setup(E-foil) . And currently it works much better than standard RC remotes. Hope to finish the remote within a week will share then😊
several other “functions” that had been fun to impellent:
A Gyroscope to know if the board is flipped,
“cruise control” A combination of an incline sensor (gyroscope) and a height sensor “(sonar, laser, barometric, etc… )” to stabilize the board during flight, by increasing/decreasing the throttle or/and pitching a rudder/wing(s).
Depth sensing idea if pressure sensing depth is not adequate.
Optical sensors located at intervals on the foil mast, low profile mounted, return true or false if the sensor is under water. Software averages the waves and the constants.
Nice!
Just keep in mind the friction with those shaft seals are quite high. We tried to use similar seals when waterproofing an RC remote. But the friction was too high. Ended up using a plastic ball bearing and a pocket filled with grease as waterproofing.
but we had ID x OD x Width: 10 x 28 x 9 mm seals instead. I think you will be better off!
 Naze32 Flight Controller – Adding Sonar (HC-SR04 module)")



 it works )
it works )



