Hi Clarin,
your post is one year old, is it still your interest to find a sensor for the height of the board relative to the water surface? I have an idea how one can solve this problem very smooth and cheap! I’m a beginner with efoil building, but as an electronic engineer I plan to integrate such a sensor in my efoil and let the controller board regulate the flying height.
Best regards,
Chris
1 Like
@Skysurfer I am glad to see other EE engineers around. I have been working on a auto pilot kind of controller for efoil with resistive water depth sensor from adafruit. Eventually the goal is to have a controller can do cruise type of ride mode, throttle curve and lots of other stuff. It might be possible add some control surfaces on the wings for assisted ride
2 Likes
I just wanted to follow up and let you know this fixed ALL the problems with the remote. I removed the ACK and speed up to 2MBPS. Its unbelievable the change. The remote is super responsive now, great modulation and NO delays. Thank you so much for the tips!!
3 Likes
Are these available? I would like one and furthermore we can perhaps adapt this into a paddle shaft?!
Is this tube off the shelf? Or designed your self?
Is this tube/housing off the shelf or designed your self?
Hi!
I want to show you my easy waterproof remote.
It’s the circuit from a maytech remote (from Alien power) slightly modyfied to fit inside a 100% 3d printed housing (petg / tpu) covered with epoxy.
It does not use a hall-sensor. Instead the throttle is mechanically connected with strong magnets to move the poti on the inside.




5 Likes
Great design. Looks good
Hi, I found a waterproof remote on Aliexpress and the first impression is good! Not the case is waterproof, but the electronic components inside. Nice idea I think. Up to now I have made no tests in the water. I will try later.


2 Likes
suggest you make more coating on the circuit board and the battery connection before salt water test
Dear Skysurfer, did you try that remote finally? Can be a good choise about trasmitting distance and charge time?
Hi, late replay but allow me to defend the autoack and LED signaling, it has been soooo useful out on the sea when for some reason (water entrance, antenna problem, you name it) the efoil stopped, knowing if remote and receiver were paired and communicating (or not) it’s been a huge plus in troubleshooting my build. I never felt that surge for a faster communication nor the delay mentioned, but my Arduino surely needs improvement. I had to pull the antenna out of the box, on the nose of the board, this made the transmission steady. I won’t raise to 1 or 2Mbs because this highly reduces the reach of the signal and can cause several malfunctions. The only “goal” for my remote was to be super smooth, insensible to throttle jerkiness, with a slow and constant ramp and the ‘fast no signal safety stop’. Other than waterproof.
Hi cippoco,
I’m still working on my build and so I have no experience yet. The remote seems to work with Bluetooth modules, maybe this is not so rugged. But I place the ESC away from battery and electronic right on top of the mast and use ferrite rings on the power cables at the ESC to reduce the EMV. Hope, that I get no disturbance on the remote!
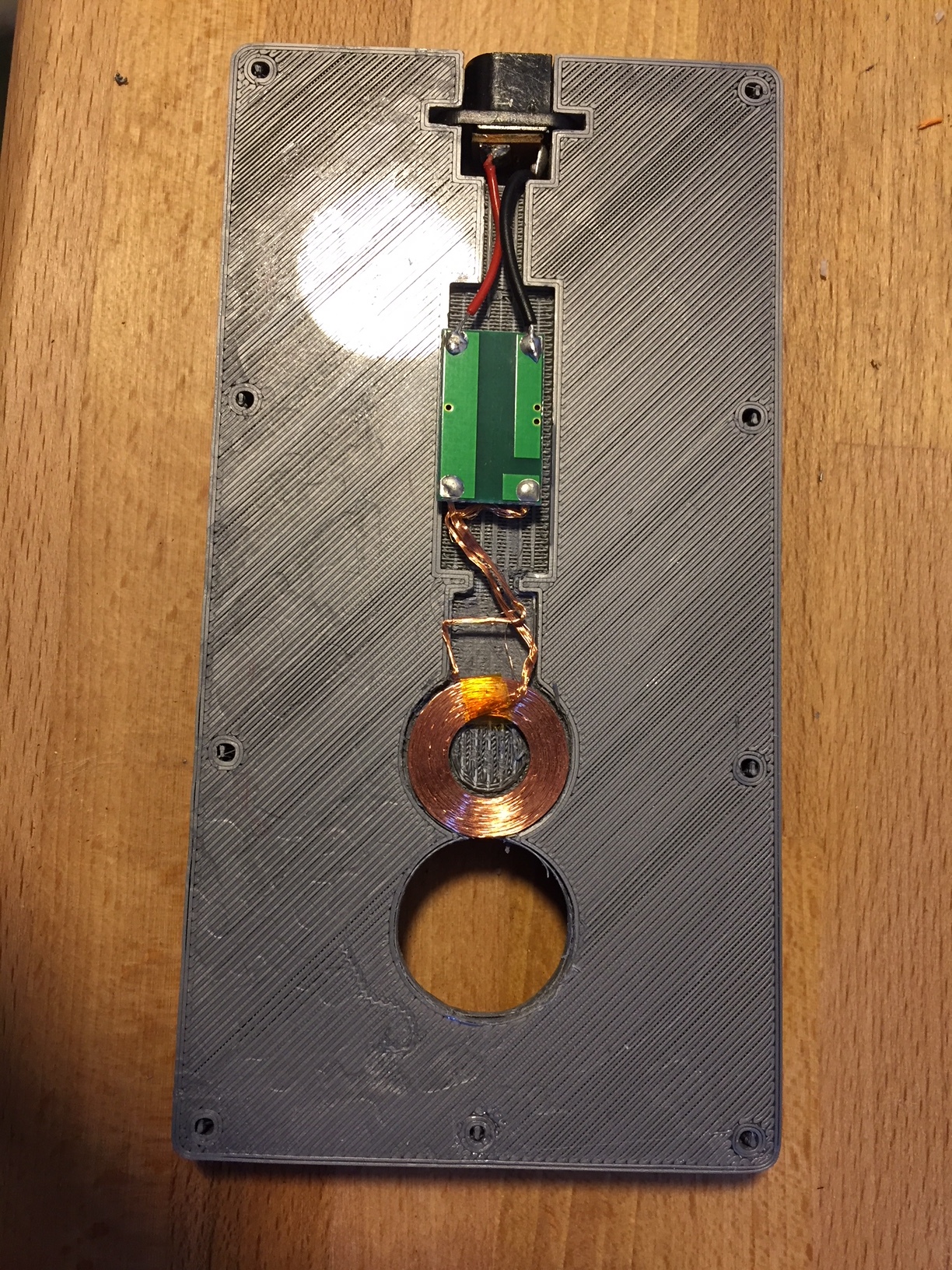
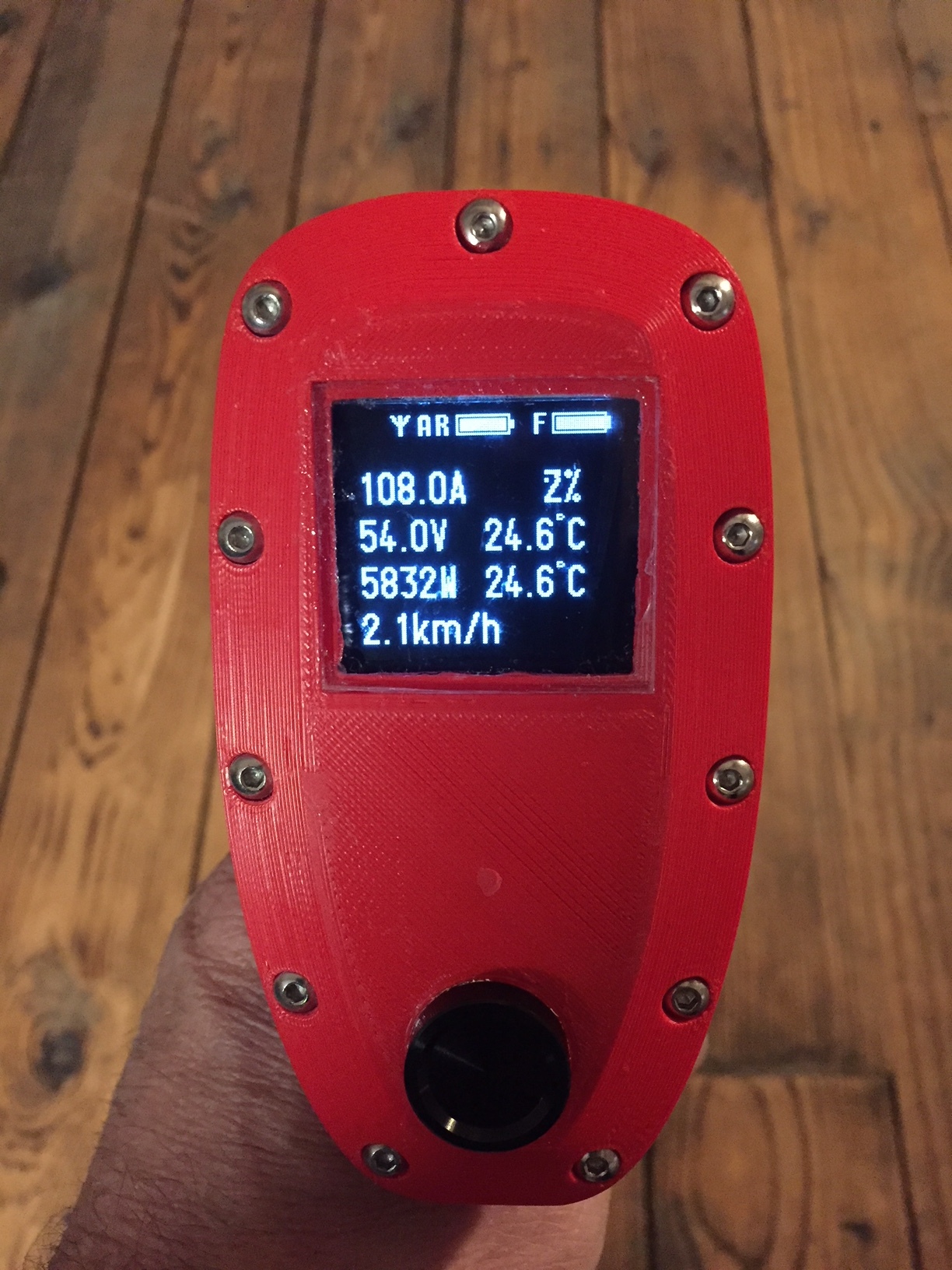
Quite a long time after I started, finally my adaption of the Hiorth remote hand set (thanks for the step file). Added a 128x128 OLED. It was the maximum I could fit in and the brightest one I found. It has a relatively slow update rate because of the I2C but I think it is OK for the purpose. I was not happy with different momentary switches I tried, waterproofing was an issue. I now use a piezzo switch which is 100% waterproof as the top is made of one piece. It only creates a short pulse when you push it so you need a LiPo charging board that can be switched on and off with pulses. One puse = on, two consecutive pulses = off. I also added wireless charging to keep things waterproof. It gets hot but not above 50°C, I needed to adjust the gap between the coils to control max current (more current -> more heat). If you use wireless charging it is important to shield the electronics behind the coil from the magnetic field, there is special thin flat ferromagnetic material for this purpose but it is expensive and difficult to get so I just used magnetic steel sheet from an old amplifier. As a micro controller I use an arduino nano with nrf24. There is one available with the nrf24 on board, this is much easier than connecting a separate nrf24 (but the wiring cannot be changed). As I’m sure the sw needs still some tweaking, I connected the serial port of the arduino to a modified HC-05 bluetooth module which allows programming over bluetooth. This way it can be reprogrammed without opening the enclosure. the BT module can also be used to log data to a pc or even an android phone with serial over Bluetooth. Battery is a 1500 maH Lipo, it lasts about 8-10 hours.
The receiver side is still on a breadboard, it uses the same arduino with built in nrf24. I added 2 temperature sensors which use the one-wire-bus. Battery level will be measured through a voltage divider, it is simulated with a pot at the moment. Current will be measure with a hall sensor, it’s also simulated with a pot. There is also a GPS module connected to the receiver over sw serial. All values like time, speed, position, temp, current, battery voltage are sent to the hw serial port where an openlog logger is connected. I also plan to read rpm from the ESC with a brushless RPM sensor.
I’m quite busy at the moment but I hope to find some time to create a git repository with all relevant information.



8 Likes
Is it waterproof? First test.
8 Likes
Wow! Excellent job @sat_be I will follow this thread now with great interest  what type of ESC are you using?
what type of ESC are you using?
Plan is to use a 240A FLIER ESC which I bought a while ago. I haven’t tested it yet.
Is it possible to review the Arduino code? I am planning a similar approach.
1 Like
I’d be interested in the code for the battery indicator. I have finished my remote control, but the programming is not ready yet.






15 Likes
