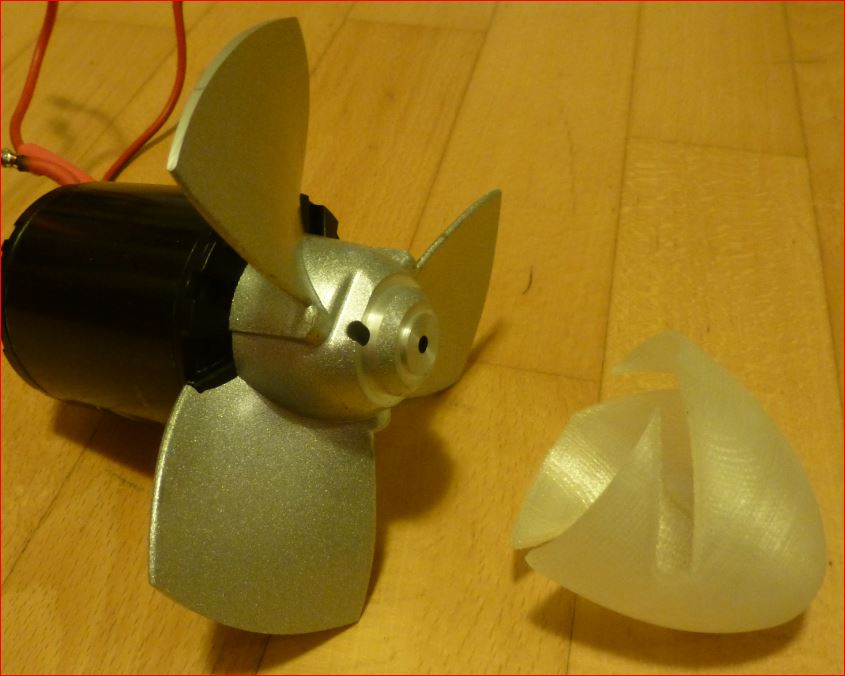
Tonight i want to present a solution for the spinner, kind of enlarged hub of the prop.
The problem is, you wil never find a commercial prop which fit your needs perfectly. Mostly it is too small compared to the diameter of the motor, so one would have to make a kind of adaptor, which reduces the diameter of the motor to the diameter of the props hub, to make the water run without disruptive diameter steps which causes caviation. This will add some length to the drive system, which leads to higher forces, vibrations, bearing stress etc. and is therefore unwanted. We want to keep the system as compact and short as possible. Ideally the prop would sit on the rotors diameter and enclose it completely. But from that edge where the rotor ends we need some spinner anyhow to avoid cavitation. This spinner could be turning or standing still, it also can be parted.
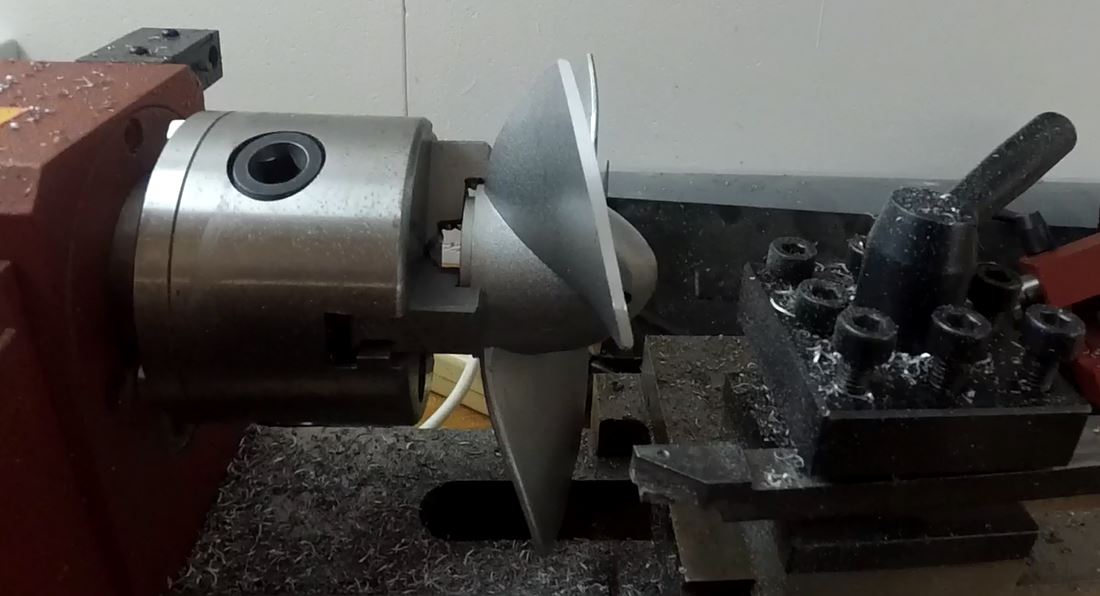
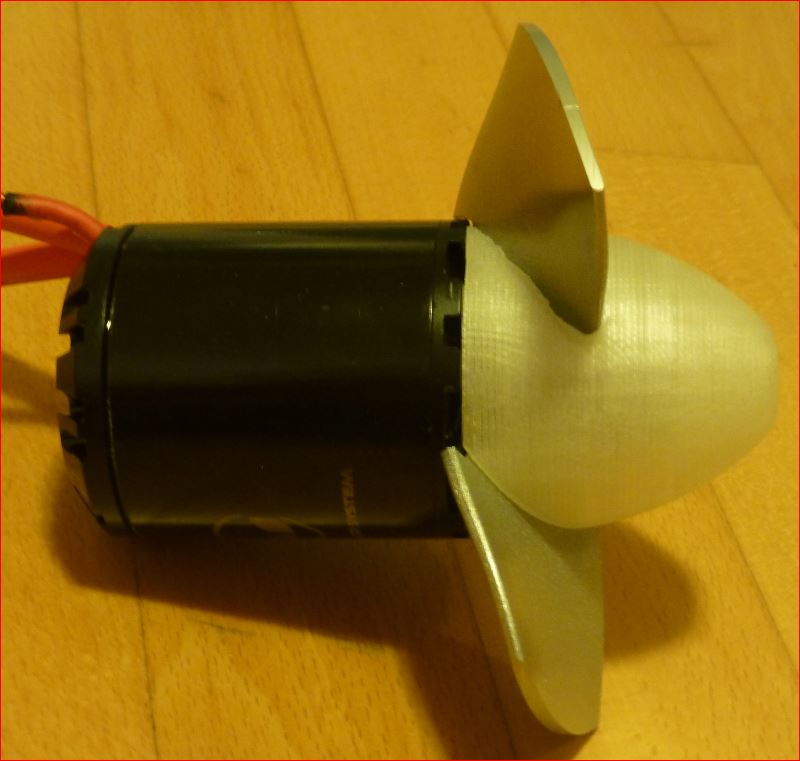
So why not integrate the prop into the spinner and let the prop partly enclose the rotor.
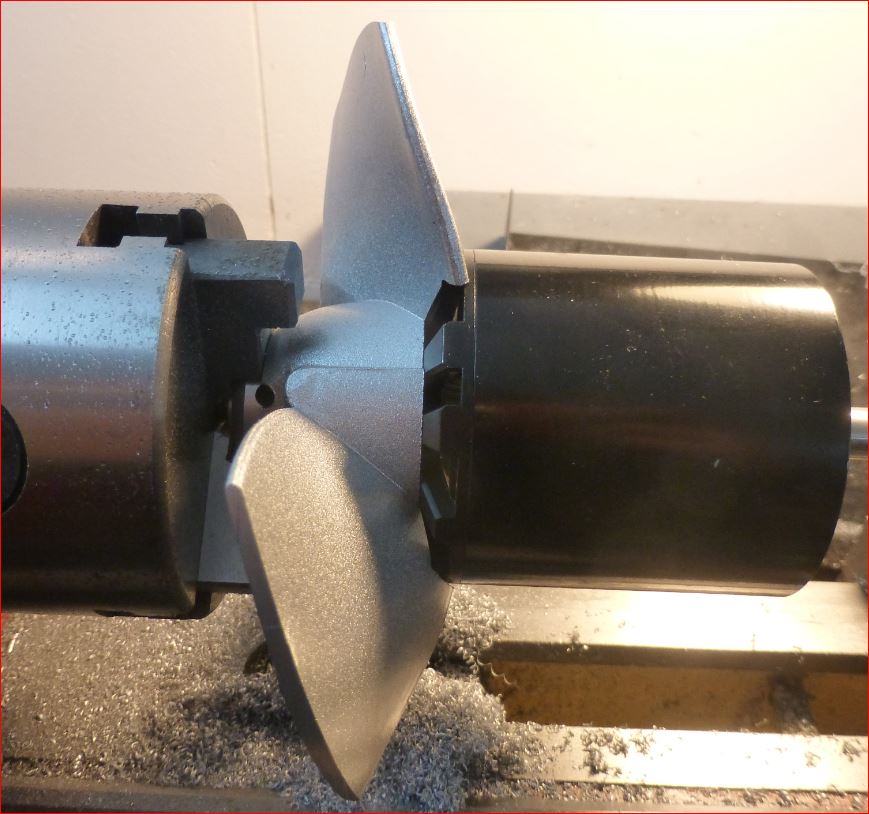
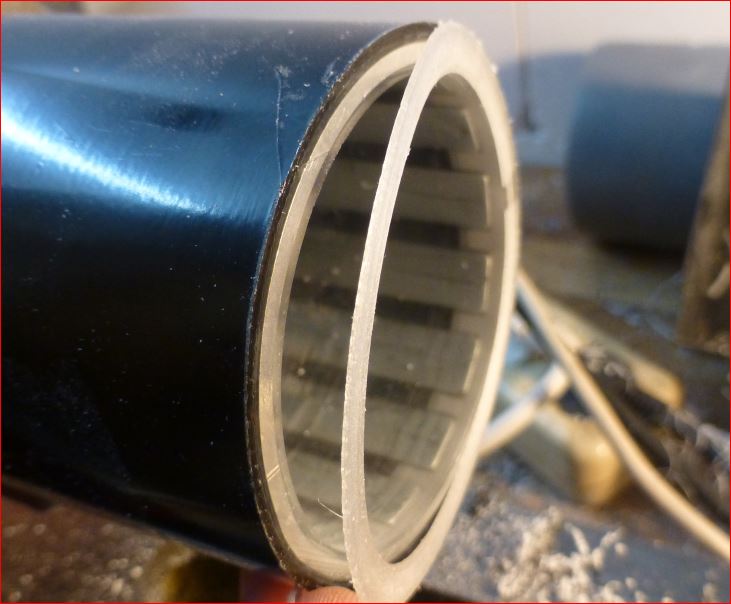
I am not so good in retracing this unique prop design, so i kept open some spiral slots, so the prop falls into the 3Dp spinner and has little gap. It is printed from clear PLA with break away supports with 3mm wall thickness, the small end is on the bed, like a cup.
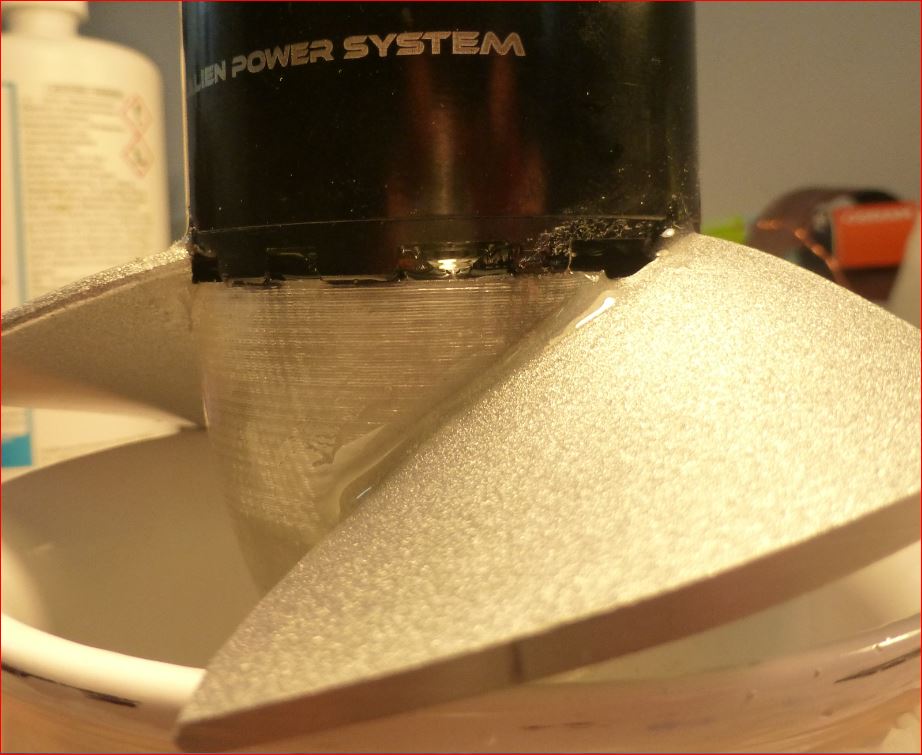
The gaps i filled with 5 minute epoxy which is thickened by default and has some nice features as it holds together in a viscous form. It can be driven into the gaps between prop and hub to tighten and to get nice curvatures. I use a 3x10x200mm balsa wood piece to mix and manipulate, on the cavitation side with a radius.
I also do this, to get the spinner and rotor tight to be able to cast it with epoxy. Took me two rounds, wet in wet technic.
I would have liked to use 40 minutes epoxy but the amount of 140g i estimated took me to the long curing casting epoxy again. I have time to do so. I can wait. I know why.
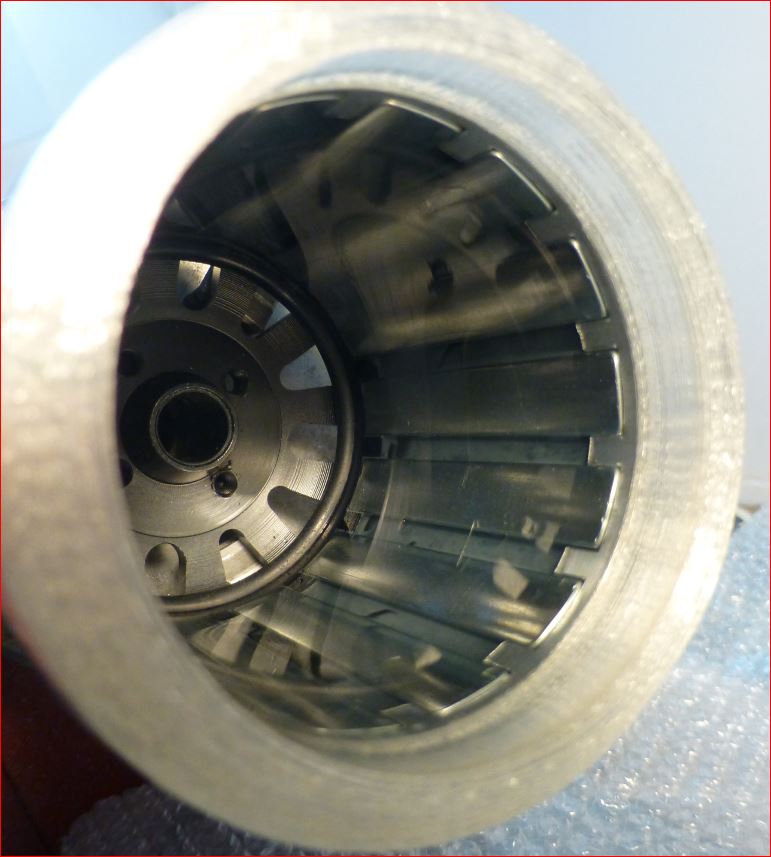
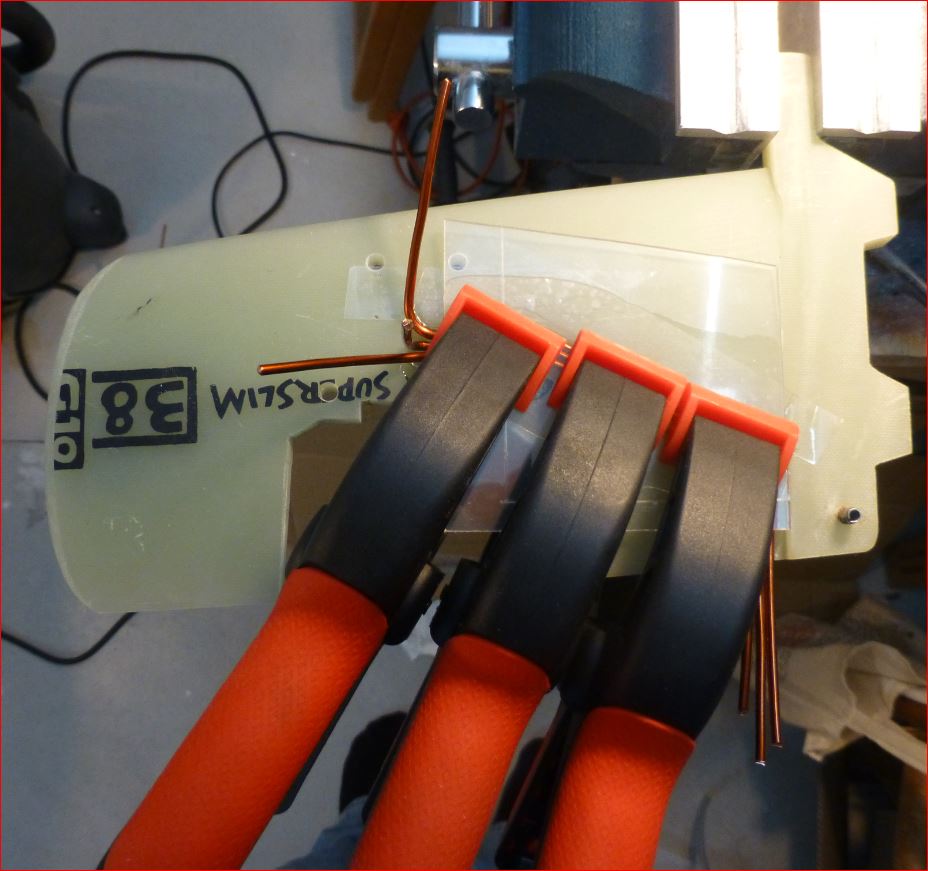
I filled in about 100g epoxy into the spinner and props hub, so everything beyond a certain level is massive epoxy, aluminium, pla, stainless steel. Apropos: I put two stubs into the threads of the rotor face as drive pins to have some kind of insurance in case the casting turns out bad in some way and cannot resist the torque for some reason.
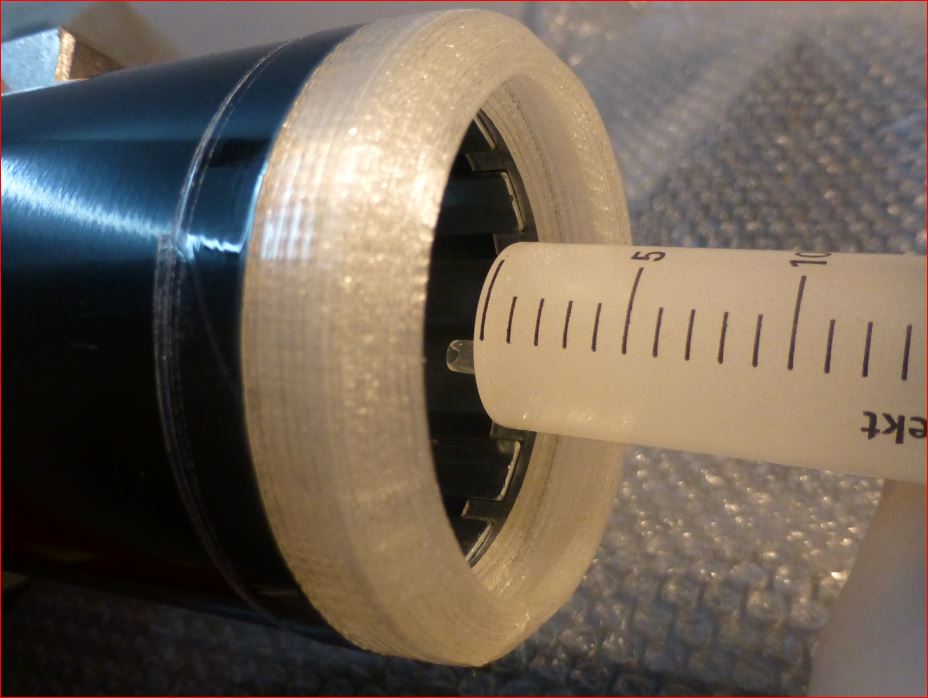
The pla upmost edge is the level of epoxy, it will run over it. Take care it is perpendicular.
Check the outlets, they should be opened.
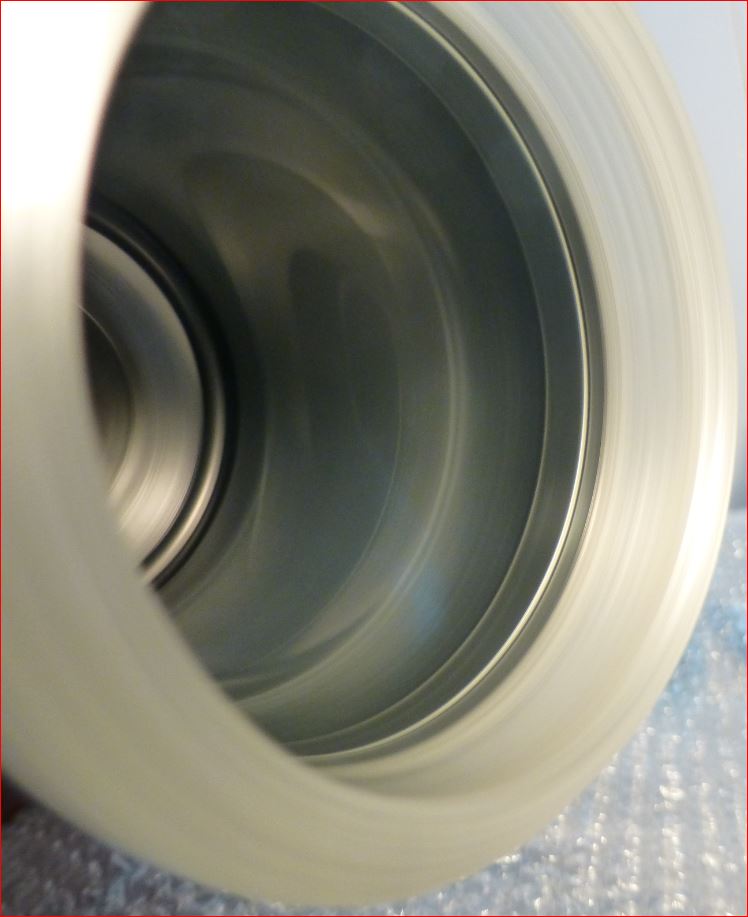
View from top, where i filled in the epoxy and wiped the rotors inner diameter with some epoxy.
to be continued…
…luckily i kept some mixed epoxy in the fridge while i was warming this monster. After 10 h, the epoxy inside the motor and spinner had shrinked or vanished, so i took the rest and put it in, so it was running over once more. This time it went very good. Just tested the motor with prop, uses 76W at full throttle in air, almost same as without prop and spinner and without hydrodynamical optimizations.