I planned to do the same thing, but didn’t do any calculations or thinking regarding heatsink size. But I forgot that there isn’t really space on the bottom due to the foil, I would need to put the esc way forward. So I thought a heatsink on the top could do the trick too, good airflow is provided.
Material flow is the trick, especially water below 25°C.
Because I am uncertain about the amount of heat dissipation I wanted to dry test motor + ESC with different cooling solutions to see which ones are suitable and which aren’t. But on the other side I want to get going quickly and haven’t found a perfect cheap way to load the motor realistically without putting it in water. I want to use the Freefly Arc200, which has very promising and believable current specs:
Max peak phase current: 200A
Continuous current with little to no heatsinking (hot-side facing upwards and unobstructed): 60A
Continuous current when bolted to a typical EV aluminum chassis: 100-150A
Continuous current with infinite aluminum heatsink or water cooling, and forced air cooling on phase wires: 200A
https://freeflyrobotics.com/products/arc200
That makes me believe that it is enough to bolt it upside down to a aluminum heatsink on top of a aluminum box.
Hi PG
I spent a long time trying to find this link as I found it on my work laptop
Please let me know what you think of the final summary at the en of the video with regards to power requirements
Lastly, I feel the propeller/mast configuration is absolutely ideal for a powered efoil and for a powered surfboard
Best regards
Peter
5 Likes
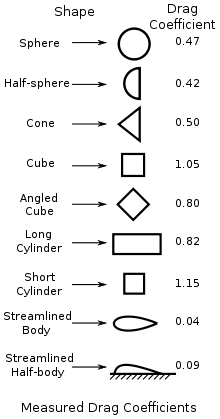
I think that you and BorntoSurf are both using drag coefficients that are way too high for a streamlined torpedo shaped body - a CD of 0.04 or 0.05 would be much better for this kind of shape. (See “streamlined body” on right of page)
Drag coefficient - Wikipedia
This would reduce the calculated power required for just the “nacelle” to around 6 watts at 5 m/s and 70 or 80 watts at 10m/s. Of course there are various other losses - skin friction, interference drag, etc., but the actual nacelle loss is fairly small.
1 Like
Ok, the loss of streamlined body is low. But are our torpedo style motors really that good? I doubt it. Maybe we find a compromise with 0.1. Still there is needed a duct and wings and fins to hold it. Interacting with the prop. This is very hard to estimate.
Thank you for this video, it is amazing low power requirement, but also the velocity is very low. A wing span of 2m is unfeasable for me. There is no safety by a duct. In the wavy conditions even on the river main it will not work. Mechanically it is very complex and brittle.
Driving on a flat water surface gets boring very quick i can tell. I want much more dynamic behaviour, lets see where we get.
1 Like
I agree - a CD of 0.1 is a good compromise. However , as a retired Boeing engineer, having read through many, many posts here, I think that people worry too much about the drag of larger diameter pods, like 80mm versus 60mm, and not enough about interference drag, which can be reduced by fairing between pods/wings and masts instead of sharp discontinuities, and making sure that the hub downstream of the propeller is faired out, rather than having a sudden cut-off.
3 Likes
This is just a quick blasphemous idea, but can you rule out that those issuse could come from the input signal?
Hi Eclecti…
Very interesting previous career! I studied physics and engineering physics and now design computerized gasoline detectors, although semi retired.
I was talking about the waterwolf with a 3.5 or 4 inch OD drive pod. Even my old 55 horsepower outboard motor’s was smaller or of similar size so i was suggesting for a motorized surfboard a direct shaft drive at a 5-15 degree angle provides a huge boost in battery life. A 4 inch hub with as you say a .4-5 CofD because they dont use the best profile uses almost 30% of its power just to overcome the motor’s drag.
Anyway, i researched human powered and record breaking human powered hydrofoils and was pleased to find they need 400 watts to fly and 200 for sustained flight…
At one point i had patents all over the world for extremely simple designs that were just ingenious so I really love this website for the shear volume of creative engineering.
1 Like
Sorry Ecle…
Just saw this
Water wolf uses a half sphere, which is .42, torqueedo the same…
And PG, the world record holder uses a far smaller wing so I just liked the 80 inch one because of the design I have in mind. (basically store the wing along the board)
On 27 October 1991, Mark Drela pedalled the human-powered hydrofoil, Decavitator , to a [world-record] so (http://lancet.mit.edu/decavitator/video/recordRun.mpg) speed of 18.5 knots (9.53 meters/second) over a 100 meter race course on the Charles River in Boston, Massachusetts.
so about 35 k/hr
I live in a windsurfing/kitesailing community (Hood River, USA), and was a windsurfer myself until recently, although I never tried kitesailing. I find you comment about “driving on flat water” interesting, because windsurfing/kitesailing without foils provides much more dynamic behavior than with foils. For me, the advantage of foils is speed - it certainly doesn’t make things more “dynamic”. Maybe you are saying that a kitesailing-type foil has better turning ability than a 2 meter HPV foil, which I completely agree with - the Decavitator was designed pretty much for straight line operation, and would get boring (and tiring) very quickly.
At least i know the Vesc is reaching 95% DC without load or low load when starting to submerge the prop. I cannot tell if the input signal is stable when reaching high loads though. On the other hand i had comparable behaviour with another transmitter/transceiver and also another Vesc, even enertion focbox. The same is true for another motor/prop, it never went to 95% under load i am rather sure now.
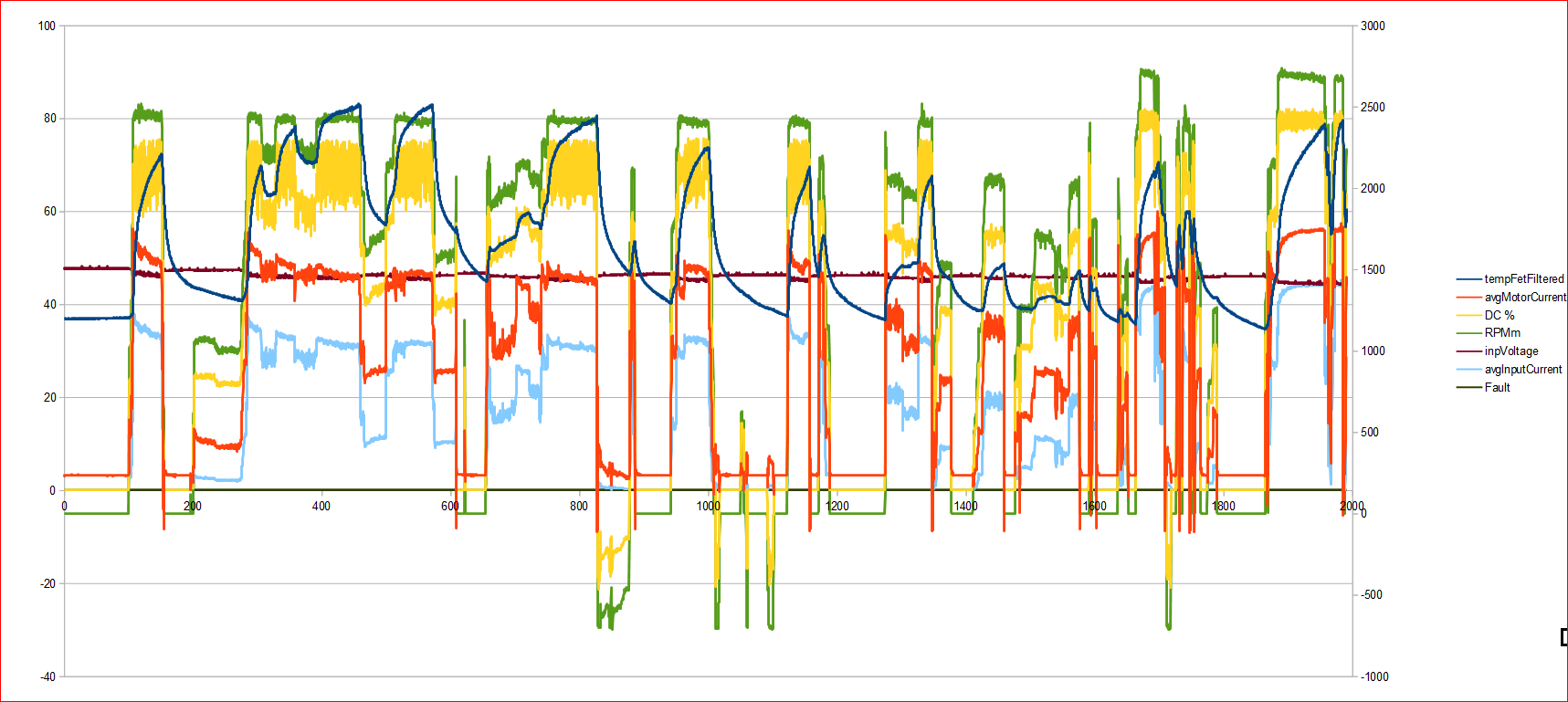
Left scale is V,A,°C,% right one is mechanical RPM, x-axis shows seconds.
This was taken with 100A phase current limit and 200A absolute limit.
I also have this effect, that when the input voltage is lower, the power reaches a higher level.
Do you have a new idea?
For practical reasons i think about top side mounted heat sink, too.
Lets build an artificial small cooling lake filled with some water placed on the aluminium heat sink. Our ESC would sit below it, directly clamped or via a copper adapter or whatever connected to transfer heat in masses.
I call it salina, maybe we can cook some fish.
Question is if one can guarantee that there are cool 100ml of water inside the “cooker”
Either you exchange the water by hand or by a house system. 
I like this concept. It is easy to build. And it has thermal potential.
1 Like
I am not sure what you have in mind. Do you want to cut a reservoir into the board that fills up with water and submerges the heatsink?
Also nice, a place to warm your hands, yes a small lake of water is needed to cool the electronics.
Are you sure air cooling isn’t enough?
Do you have a rough number how many watts the ESC has to dissipate?
If I assume 50W of heat, 40 degrees thermal budget (difference from ambient to max ESC temperature) and very light air flow (~1m/s) a heatsink calculator says a 10x10x2cm heatsink would be more than enough. And I think those numbers are all very conservative, at least the airflow and thermal budget, the heat source power was just a random guess, I have no idea what the losses of a good ESC are.
2 Likes
I use the calculator : bavaria-direct.co.za
12s 80a should be around 40w… I guess it depends how is built the esc
My set up works with this: https://www.conrad.fr/ce/fr/product/188049/Dissipateur-thermique-CTX-Thermal-Solutions-CTX44100-L-x-l-x-h-100-x-159-x-15-mm-Rth-17-KW
But i am testing a watercooling Plate 50x80mm with a peltier module 75w and results are amazing!
2 Likes
For your heatsink this calculator estimates around 60 watts minimum to be able to dissipate for 2.5 m/s airflow (I used 150 as volumetric thermal resistance, whis is the highest value for 2.5 m/s [higher = less airflow, lower = more airflow], so there is much more potential). 2.5 m/s is only 9 km/h, that is reached quickly when trying to get on the foil.