Yes I’ll put a duct on the prop, first a little test to see how it’s running in the water. I’ll have to find a easy way how to build a duct and how to put it on. Motor is the same as in the board, rotomax 80. Bike throttle is simple, but waterproof.
1 Like
Look at making the external section out of drainage pipe (normally has about a 5mm wall). It would be a lot stronger than anything that is 3D printed. You could then run 2 sections from the mast to the duct to hold it in place.
Hi @PowerGlider, how is it going with your trials? Do you have new data with your 7.5x7 prop? Did you try your setup on any hydrofoil? What is your max constant current of VESC4.12 you are able to maintain with cooling heat pipes?
I think the 7.5x7" prop will never arrive. I did not make more trials.
First i had to wait for a new switch, the old DMS did not contact any more 
Than i tried to find new places nearby to drive. It is not allowed on most of the lakes around Frankfurt. So i went to a sailing club at river Main. They have a lot of nice boats, and i have been sailing a lot the last weeks.
Now the switch arrived and its all built up nicely again. Waiting for windless days, in future i will drive on the Main.
I will not switch to foil in near future.
I have no test stand for dumping 80A and i do not plan such. I had a kind of setup where i could dump 75A of D-current into the slow turning motor endless. The limit was the inner temperature rise so i had to cool the closed box with some wetted cloths from outside. Benjamin showed this D-current trick in one of his vids. But i learned this is not the same as really driving the current into a real turning motor. The DC-Link circuit is not tested by this and the switching losses are also not the same.
1 Like
I increased the angle of attack for the complete fin and motor by modifying the fin screw. So now the motor/prop lift the stern a bit. The effect is amazing, it feels as if it is gliding immediately, the stern is not drowning any more and the complete board lifts much better.
I tried to tune the VESC further with 0.5mOhm shunts and shorter battery wires and cut out the BMS, built in new larger caps. Anyhow, i never get more than 2.1kW through it, going down to 1.3kW after everything warms up. Its all the same as before. I dont get it.
Thats good news @PowerGlider, are you using it on a surfboard without foil with the custom 80100 motor you got made that you were using earlier in the thread? What modifications did you do to the VESC so it could handle the power?
Its good to see the improvements being made to the direct drive method!
@PowerGlider I should be testing your motor in July with Foil. I have 2 designs. One with oil cooling(and pumping oil up to ESC with motor spin) and the other just epoxied. I was running the motor with remote yesterday and it was impressive the amount of torque the motor puts out. A couple of colleagues watching stepped back when I wound it up. ha
Maybe all these outrunners are like this but it is impressive getting 5hp in such a small package. Should be no problem foiling. I’m actually looking at a low pitch prop for efficiency. I don’t need to go 20mph. This motor to me is an uber to surf. 
Thats nice to hear. This motor is nothing very special, it was just an optimization regarding the stator length to get more power and torque per volume compared to the standard motor APS6384 sensored. Did you have a chance to measure the output watts? Which ESC will you use?
This thread is about the APS6384 motor and modifications. A kind of history about my build i started already in late 2016. In the beginning i used a YEP120A watercooled with a closed cooling system with hoses around the battery box. It held up for some hours of driving, going up to impressive 4kW. When the watercooling collapsed due to a sqeezed hose, the advertized power limitation by temperature did not work, the PCB and most FETs destroyed.
After that i switched to a VESC X or meanwhile called FOCBOX which gave me about 3-4kW but only for short time. This VESC X i tuned with small heat sinks glued directly on the Fets. I widened the temperature limits to 110°C and maybe this was a capital failure, because it died after some hours of use. One or two Fets blown, PCB damaged.
Than i got money back from hobbyking for the YEP and bought an elder slumpy version of VESC 4.8 or so. This i tuned with heatpipes and massive copper. I bought 0.5mOhm shunts and new caps 3x860µF. Pictures are with old cap and shunts just before changing.

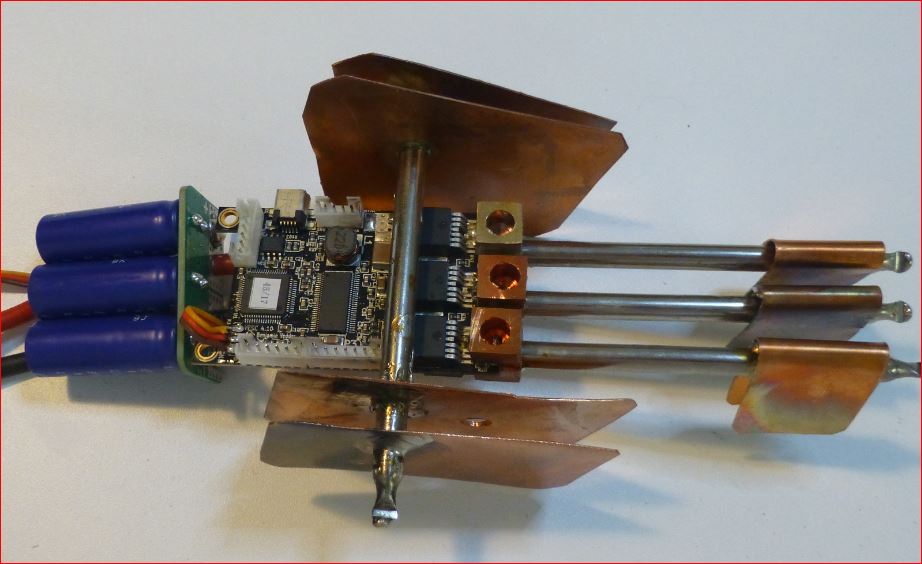
The temperature degradation behaviour is a little bit strange: I get 2.4kW when its cold, than go slowly down to 1.3kW. After 10-30s it goes up to 2.1kW with a jump and have to be careful not to fall. After this it is repeating while the box warms up the intervals with high power get shorter, falling quicker to 1.3kW. I would have expected a rather stable temperature by the algorithm implemented and a rather stable output power. I cannot recommend the heatpipe construction shown, because heatpipes are dangerous to solder, they can explode and hurt your ears and parts can fly around, no fun.
2 Likes
Thats funky!
Looks like what an ESC would look like back in the 50’s…
Not sure I get fully what you are trying to do with the YEP120 with adding water cooling, why not just buy the water cooled YEP or another ESC for high current that already has water cooling?
But really, that is creative and cool looking!
1 Like
Wow thats quiet a cooling setup!
What you are saying about the cooling algorithm for the vesc is very interesting, on my electric skateboard the current limiting as the temperature increases is very
Smooth, but the power would never rise again unless I’m on a downhill or stop for a few minutes so the esc can cool, I don’t understand how the esc would cool down while you’re still riding?
I was doing some thrust testing yesterday in the pool with the VESC on a propeller I 3D printed which wraps around the motor, it’s a 190KV motor 6364. The diameter of the blade tips is 120mm.

It put out A lot of thrust, it was very hard to hold back with my arm The VESC could only reach 35% duty cycle (12s voltage) so while the battery current was only 30 amps the motor current was at 85, the vesc heated up very quick at full throttle. Next test will be a 2 blade propeller, same diameter and more pitch, hopefully achieving more rpm and hence more duty cycle for the VESC.
3 Likes
Looks cool! And with 85Amps motor current heating is expected to be quick, mine did even get hot with -5C temperatue and some airflow. The stock cooling is quite bad. Cooling down is pretty quick if you get back to a reasonable motor current, the heat produced by the conducting mosfet switches on the vesc rises exponentially with motor current (P=I^2 * R).
So you definitely need a load with less torque demand.
Interesting approach, please let us know if you have new results.
2 Likes
You could print a prop which sits right behind the rotor of the motor. By this you would not add such a lot of drag by the wall thickness you are adding to the diameter. You could add a cone to prevent cavitation, but leave some holes for the cooling water.
1 Like
I think I will end up doing that @PowerGlider , in this configuration the diameter is increased by 5.8mm, and it would probably enable more blade area closer to the shaft if the prop was mounted there, so it could be more efficient.
I made a new 2 blade propeller that I’ll do some tests on this afternoon, it fits much nicer and has more pitch than before.



Its only mounted to the bottom this surfboard for thrust testing, in the final setup this will be the puller propeller so facing towards the nose.
I will test in a few hours to see how it performs
3 Likes
I just tested the above prop setup… It was pretty bad, compared to the last design with less blade pitch.
I’m scrapping the dual propeller idea for now.
I now plan on having the two motors attached together like this:


These KEDA motors are very easy to work with, I basically have connected the bells of the motor by putting M3 screws through the propeller mounting holes, and pushing the shafts maybe 4mm through so the rotors are well aligned.
This will make it much more efficient than one propeller per motor, and it should be easily able to peak over 4KW reliably with 2 VESCS.
be sure to use current control, dutycycle or rpm control will fry your ESCs and maybe motors.
Are those sensored?
1 Like
rpm and dutycycle control cannot override the maximum current setting in VESC, there is no need to use current control as input signal. I use dutycycle.
1 Like
You will need two points to mount the stators, at least you need transfer of the torque? Than another thing becomes important: You need to align the stators AND the rotors, than it would work.
Be careful with two VESCs, they influence the bus voltage (and ground) of each other which can lead to voltage differences destroying some interfaces in the past.
6364 alone might be a little weak, never tried it, i only have experience with 6374 and 6384.
With 190Kv it is also a little weak in torque.
Try to build a prop with 4" pitch and same diameter for a single motor.
1 Like
Yeah sure, for a single motor the difference is just acceleration or rpm drive.
But if you use 2 motors mechanically tied together you have to measure each motor independent and then use current control, so the power gets distributed equally. Otherwise minimal changes in motor design or model errors will wind up in the PID controller and cause unequal power distribution.
1 Like
Thats good to know about duty cycle, i’ve never used it, what are the advantages?
I use 2 VESCS on my electric skateboard, and use CAN-BUS control so the master VESC controls the throttle of the slave VESC via CANBUS, it hasn’t given me any issues at all in this configuration
The stators will be connected with a 3d printed structure that locks them together, and the stator are aligned perfectly as the same shaft goes maybe 5mm through on and all the way through the other.
yesterday I tested a single 6364 in the pool with Pacificmeisters 2 blade propeller. It was amazing compared to the propeller that mounted by covering the rotor, i could hardly hold it back with my arm, and that was with a VESC pulling 35 amps from the battery, the motor was at 85 amps though! I’ll try it again this afternoon with a YEP120A HV, hopefully it will be able to run 2.5kw. I was surprised how powerful it was I am sure it could work with one 6364.