Help page says:
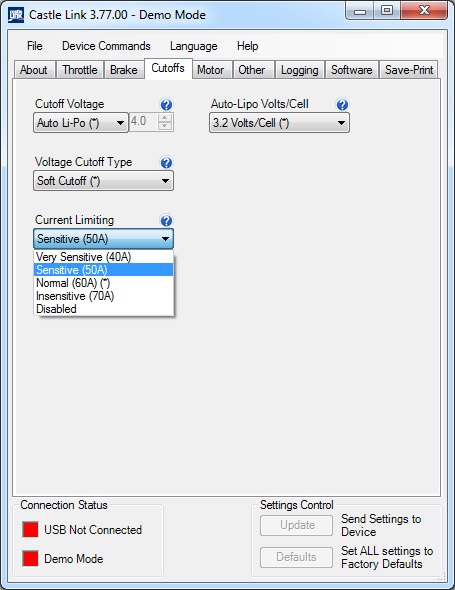
Castle Creations controllers have several forms of built in protection, one of which is ‘Current’. This setting changes how the controller protects itself from too much current, or inadequate batteries. Generally, for aircraft use, there is no reason to change this setting except to experiment. Helicopter use can put large but short load spikes on the system, and will benefit from changing this to either insensitive or disabled (to decrease the chances of the controller turning the motor off). However this will increase the risk to the controller from over current. Using a battery of too low a discharge capacity can sometimes engage this protection feature by creating ripple current. If you are getting premature cutoffs, and changing this setting to disabled cures them – look closely at your pack and connectors to be sure they are adequate for your application.
Option description:
Very Sensitive (40A)
See above description.
I had it set to very sensitive at first and then changed to normal. Didn’t feel different. Same cutouts. The limit options I see with connected ESC are much higher, I saw the Castle Link demo mode doesn’t show the same for some reason. Normal setting is 240A, sensitive I think around 180A. Thanks for the suggestion though. I will continue to experiment with the parameters once I have the pod dry and waterproof again.
This could also be de-syncs problem related to acceleration it’s a common problem on quadcopters. Also unloaded Motors Pass lots of current and get very hot. If you have and throttle setting for smooth I would try that bed accelerations will cause a desync timing definitely can be an issue it is a 6 pole motor
If you cannot limit the current with this feature you need a propeller with lower load. How is the thermal conductance between motor housing and alu pipe? Is it fitting well?
@PowerGlider, the alu pipe is fitting ok, thermal paste is in the gaps. I just did another short test in the tank and I think the motor didn’t get as hot. I tried different timing at 0 instead of 5, that wasn’t better so went back to 5. I did set the PWM rate to 24khz instead of 12khz, maybe that caused the motor temperature to drop. However it feels like my ESC is getting hotter quicker now. Thrust feels ok but not sure it’s sustainable without something burning up. Peak 240A at full throttle. Did only a couple short tank tests until my pod flooded again. Here a snapshot:
Be more radical in the design!
Is it possible to design a inrunner in optimized way to get most torque?
Yes, sure. Eliminate all surrounding materials to get the windings out of the center and the blattered iron reach the surrounding water to cool it. Build a larger diameter at the airgap inside the given volume. Very useful graph, 2s at limit.
12 cells. Power feels like I could get up. The tank started rotating slowly but the water speed never came close to the riding speed with my short test. So it was still more a stall test. Likely the currents would be less in a real test where the board starts moving. Not sure by how much. Likely that the motor will burn up. We will see, I will try to get this pod sealed up again and take it out in the ocean soon.
In this graph you put 10kW into the motor at 50V exceeding the specified current by 3-4 times. The power loss inside the windings is 9-16 times higher than specified. 240A^2*50mOhm=2900 Watt.
You have two options to destroy the motor:
Demagnetize by heat and/or field, so the Kv rises, so you need even more current to get the torque
Burn the winding directly by too high power loss without demagnetization.
I would not risk this in the way i understood you want to do it. The equipment alone is too wealthy. Keep away such high current.
You have a point . Probably not worth taking it for a longer test with that prop, it will certainly get destroyed. I’ll experiment with different props.
Hi Chris, I have not had a chance to design and make different props. I wasn’t even close to a reasonable amperage on my last test. That 2 blade prop I tried was already pretty low pitch and small. I don’t want to give up yet and still want to try more props but I will probably burn it up next time. I feel like we want bigger motors for direct drive. Can you build a 70mm diameter inrunner?
Thanks for the feed back, it seem if i jump to a 70mm i could just make a reduction drive for the same dia and go with a higher KV, I do have a thought on this using the motor shaft as also the supporting shaft for the reduction. let me do a quick cad idea to help explain.
Hereby I must declare that I have no affiliation of any kind with this company, nor with its subsidiaries, whatsoever.
This stuff is pretty amazing though, and it is re-useable. Quite fast it gets dirty, and will look like crap, but do not care about how it looks, for prototype testing and as a re-useable sealant it is good stuff. No need to wait for it to cure, as it never does. Just smear it in, assemble your stuff, and there you go. After you’re done with the testing, easy to remove too. One thing though, you need to be careful to keep it away from rotating parts, as it generates serious drag, because it sticks like hell.
Newark carries it in your region…
I hope I was able to help with your flooding problems…
That looks like some crazy goop, thanks for pointing it out. Not sure how/where I’d use it. Probably not in the pod since stuff moves in there. Maybe in the ESC case or the remote.
Exactly that is how I have found it. I was looking for something for my racing rc-cars ESC, as I landed it in a small river once, and had to replace nearly all the elctronic in it…
…In your pod, behind the motor, around the cabling, it is still useable, just smear it in generously around the cable bulkhead, and it will hold water out. You do not dive your pods deep enough to worry about serious pressure…
Would it be possible, instead of using two independent brushless motors with two ESCs, just connect the stators of for example two outrunners and rewind them to a single Motor?
Synchronizing the rotors afterwards could be done pretty easily.
Do you think the ESCs could handle the fields of that whole new motor? Maybe with a hall sensor.