Sounds great @Chris_wilson, I do appreciate that offer. I would love to experiment with a direct drive setup and test that motor. Around 100-120kv would be even better but let’s start with the 200 and see how it goes. Is it possible to have a slightly longer shaft and without key? Would be nice if I don’t need to use a coupler to extend the shaft. I’ll pm you my address. Thanks!
It should also not be more than 12s for safety reasons.
Got it and will have it sent out.
I think Lift are running 15S
I can’t find the KW and amps now
but im pretty sure its 15S
Lift are running either 14s7p, or 7s14p. It would come down to their motor-gearing config. Both will work equally well.
*Correction: They have 196 cells in their battery, therefore it most likely is 14s14p.
1 Like
@ after testing with KV we need to make the Can longer to get the KV any lower than 200. I’m making a new sample to send to @pacificmeister it will need to be a 56114. How long do you want the shaft the sample should be done this week.
5 Likes
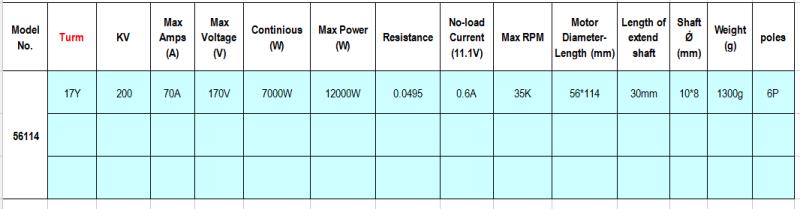



200Kv * 2 * pi/60 = 21rad/s/V
1/21 = 0.0477Nm/A
1/21 * 70A=3.34Nm maximum torque
50V * 70A=3500W max power
Max Power 12000W, continuous power 7000W -> 7000/12000*70A -> continuous current: 41A
1/21 * 41A = 1.95Nm continuous torque.
50V * 41 = 2200W continuous power
This is right on the boarder, maybe already too low power.
A lower Kv will decrease the possible output power further.
The problem is, we have a limited voltage for safety reasons.
To reach higher power at low Kv you would need to put in more mass.
You could also try to increase the airgap diameter (and overall diameter) and use a hollow shaft to save the mass. As the torque producible by a given motor is proportional to the airgap enclosed volume, the torque increases with r^2, so you get more torque by increasing diameter than by increasing length, if you can build a hollow rotor shaft and want to keep the mass the same.
1 Like
There are a few options, thought i would see if a lower KV would work first so we can keep the 56mm housing, this motor was sent to Pacificmeister to test. we will wait the results then modify from there.
Thanks for the input.
I will be back in LA in a couple days. Looking forward to see this 200kv motor and do some tests. I agree with PowerGlider that we might not quite have the power we want with 12S. Therefore optimal prop/impeller design is even more important. And we have much higher prop rpm, about twice my current prop speed. I won’t be able to just replace my current motor/gearbox with this motor.
Does anyone have recommendations (maybe even with CAD files) on what propeller or impeller design I should try first with this motor?
1 Like
You could push it to 14S to get some extra power. But I wouldn’t go higher than that. In terms of a prop/impellor its going to a real hit and miss. I’d maybe start with something in the 70mm region and then work up from that based on how much current it pulls.
Perhaps something like this would give you an idea: Change Sun 70mm 4 Bladed EDF unit
A group of guys used the 120mm version underwater and they seemed to work quite well.
Quick update. Did tests with the 200kv inrunner last night and this morning. First prop was too aggressive, 3 blades and too much pitch. Motor got out of sync at higher speed, too much torque. This morning I tried a 2 blade prop with lower pitch. Ran smooth at higher speeds. Only had time for a quick test on dock. Promising. More tests later. Have some water in pod and flushing it out with alcohol now to save the motor.
Here is what I noticed: The motor gets extremely hot after only a few seconds of static thrust tests. My ESC and batteries are cool. What could cause this?
2 Likes
ESC frequency might need to be changed?
I was using the castle edge HV 160. Do you mean this setting might affect motor heat? What do you suggest I test next? Thanks.
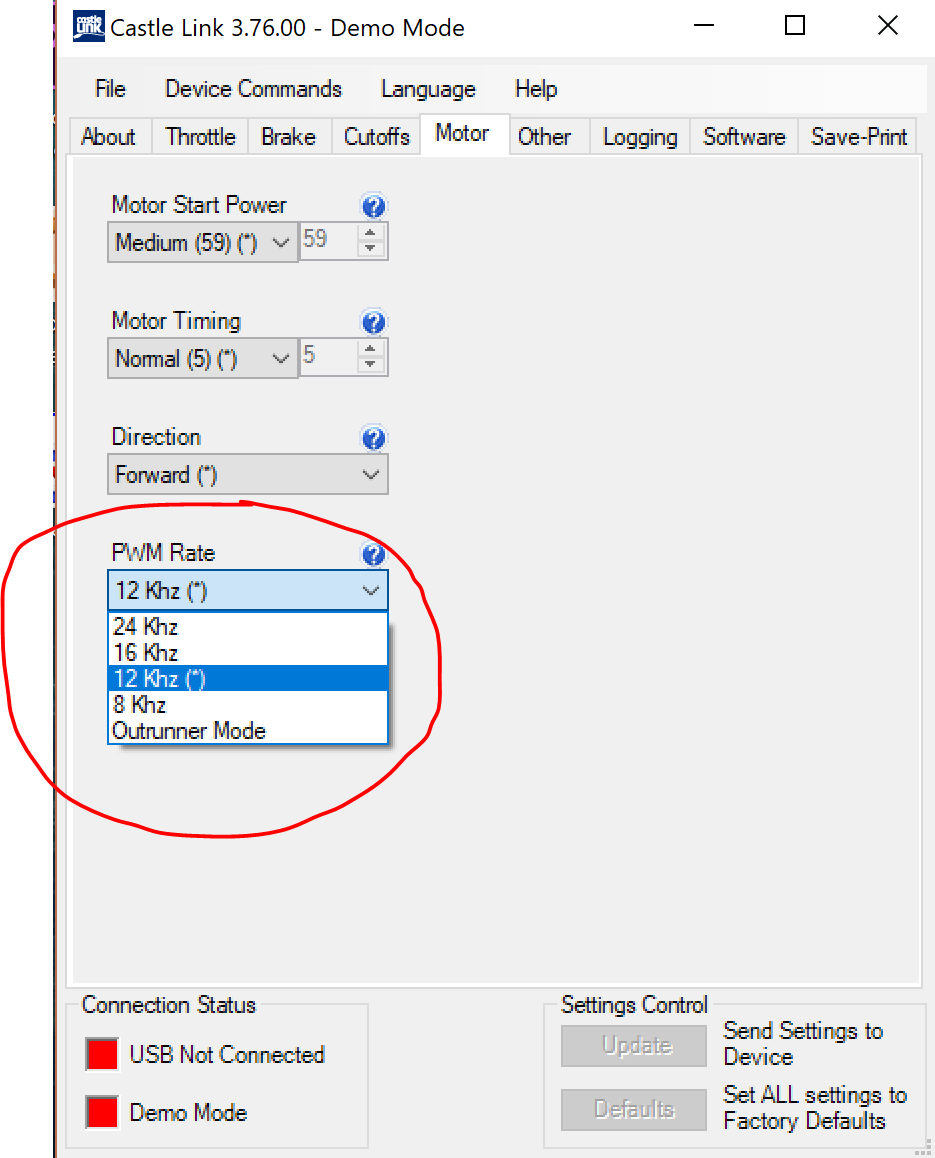
i got this formula (i read this) ; kv x volts x nb poles / 20 … is it a 6 poles? , try may be 8KHZ with 8° timing … timing is depending on winding Y or D for 0° to 12° i would say, full throttle for 1 min in your hand, my Tp Motor gets very hot off load in my hand after 30s at 0° better with 12°
it will be nice to get the rpm drop off load, static thrust and dynamic thrust…
i think see with Peter, i beleive he used a 40mm motor 4Pole with a esc that doesn’t go below 16 or 22 KHZ and this work for him …
1 Like
Chart says 6P. Is it poles or pole pairs?
Yes that’s what I meant… I’d start with that and try different values. The motor timing tab might also have an affect…
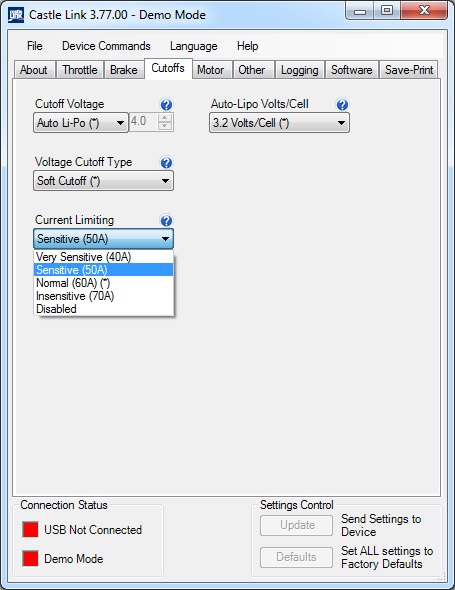
Maybe you could limit the current:
Help page says:
Castle Creations controllers have several forms of built in protection, one of which is ‘Current’. This setting changes how the controller protects itself from too much current, or inadequate batteries. Generally, for aircraft use, there is no reason to change this setting except to experiment. Helicopter use can put large but short load spikes on the system, and will benefit from changing this to either insensitive or disabled (to decrease the chances of the controller turning the motor off). However this will increase the risk to the controller from over current. Using a battery of too low a discharge capacity can sometimes engage this protection feature by creating ripple current. If you are getting premature cutoffs, and changing this setting to disabled cures them – look closely at your pack and connectors to be sure they are adequate for your application.
Option description:
Very Sensitive (40A)
See above description.
Sensitive (50A)
See above description.
Normal (60A)
See above description.
Insensitive (70A)
See above description.
Disabled
See above description (Helicopters).
I had it set to very sensitive at first and then changed to normal. Didn’t feel different. Same cutouts. The limit options I see with connected ESC are much higher, I saw the Castle Link demo mode doesn’t show the same for some reason. Normal setting is 240A, sensitive I think around 180A. Thanks for the suggestion though. I will continue to experiment with the parameters once I have the pod dry and waterproof again.