interesting, thank you , it is for my next built, the first built i use:
40mm 780KV with 6:1: so motor is twice smaller and same kv (130)
i am running 8S with a smaller propeller with high pitch (8-9 ?) for about the same speed
and about the same runnihg time at 3.78V on 8S 32A

1 Like
support for the elogger is printing… but there’s storms all weekend here 
@Benjo I agree, I expected the Yamaha prop to be to big, and also not enough pitch for decent speed, I was expecting a slow ride… very interesting.
@Mat do you think you’ll test the 130KV anytime soon for a comparison?
@Alexandre that is interesting, we have similar efficiency when you consider the watt hours of the pack and run time…I guess your output speed would be lower on 8S, which would by why you achieve similar top speed. Is your propeller a metal boat prop or 3D printed?
and the “same” wing…
high rpm low pitch on 12S vs low rpm high pitch on 8S
i am running the FR prop metal CNC made for efoil, 3100 rpm on load on the prop
i am loosing 30% on the rpm on load (probably lack of torque) , and prop slip is about 20-25% (i need to re mesure the real pitch ungiven)
1 Like
it’s not prepared at all, I need to fine-tune the 80kv quite a lot first 
2 Likes
I have been running the 80kv motor with the yamaha prop but just received my solas prop in the mail. I should be able to compare the two propellers within the next week and provide results.
3 Likes
Damn I somehow missed that post 
Thats fantastic speed with that prop. I have the prop as well but havent used it yet. I must try it and compare to my printed one.
1 Like


Guys, can you please help me to incorporate shared designs like this one of @Mat into fusion project? I can just see it in the browser but didn’t find the way to copy or download this model so I can open it in my fusion 360 program.
How did your direct drive go? it looks great in the photos you posted!
1 Like
Extract the link from the iFrame that shows the preview and delete the last “?mode=embed” part, then it will give you all download options:
3 Likes
I messed up when I tried to use silicone on the rotor. It was slightly thick so had to remove it all. Since then life’s been a bit hectic so haven’t been able to test it yet unfortunately.
1 Like
Hi Guys,
Would anyone be able to explain to me the difference between censored and uncensored motors? Why do we want uncensored motors? Also, what does it mean when the motor goes out of sync? As in, not in phase?
I’ve read through this thread a few times now and Just thought I’d ask if the 130Kv APS 80/100 Works ( with a smaller prop because Higher RPM )
Cheers.
@OwenM Sensored motors feature hall sensors on a PCB that can be used by the ESC to determine the relative position of the rotor to the stator of the motor. In a sensorless motor the ESC calculates the position from the back EMF induced by the rotor’s movement. Problem: when the motor stands still, there is no back EMF, hence no information about the rotor position. The ESC has to start the motor in an open loop without knowing the rotor position, eventually the rotor will turn and become fast enough for the back EMF to be recognized again. This results in less ‘power off the line’, you have less torque available starting from a standstill and the motor may stutter at low speeds. All the just mentioned problems aren’t really a problem for our case, sensored motors are more important for cars and all vehicles that need very low RPM. The motor has no problem starting in the water and you don’t need 100% torque within the first millisecond.
A disadvantage of the sensored motors is that you need to waterproof the sensors, PCB and cables. This isn’t worth it.
Sync issues arise when the ESC fails at calculating the correct rotor position for the current moment, e.g. because the motor gets too fast. As a result it will not send a pulse down the correct two of the three phase cables or not at the optimal time.
@jakebarnhill1 has used the 130kv successfully with a standard 7 1/4 prop.
4 Likes
Thanks a lot, Benjo! Really helpful. At least it’s not a super important factor for us then!
How’s your progress with the jet drive?
It’s going I guess. Been at college printing some components. Got my impeller printed but it’s not good enough by any means. Deciding which motor to buy because I want to be able to reuse it for a hydrofoil direct drive if needed when I find out that Jet drive is too much hassle…
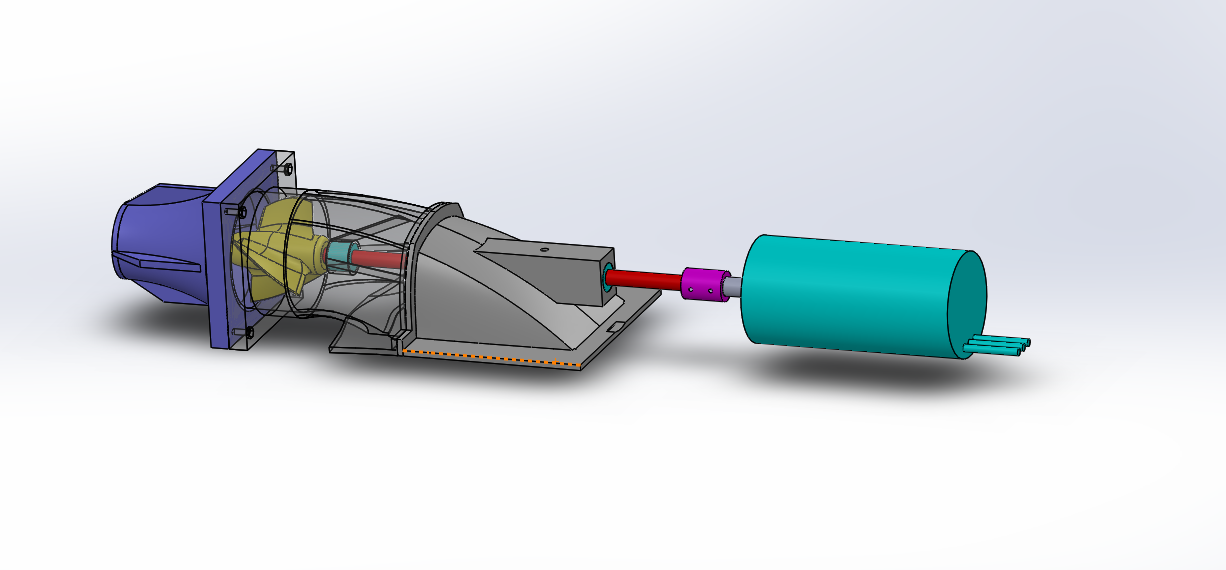
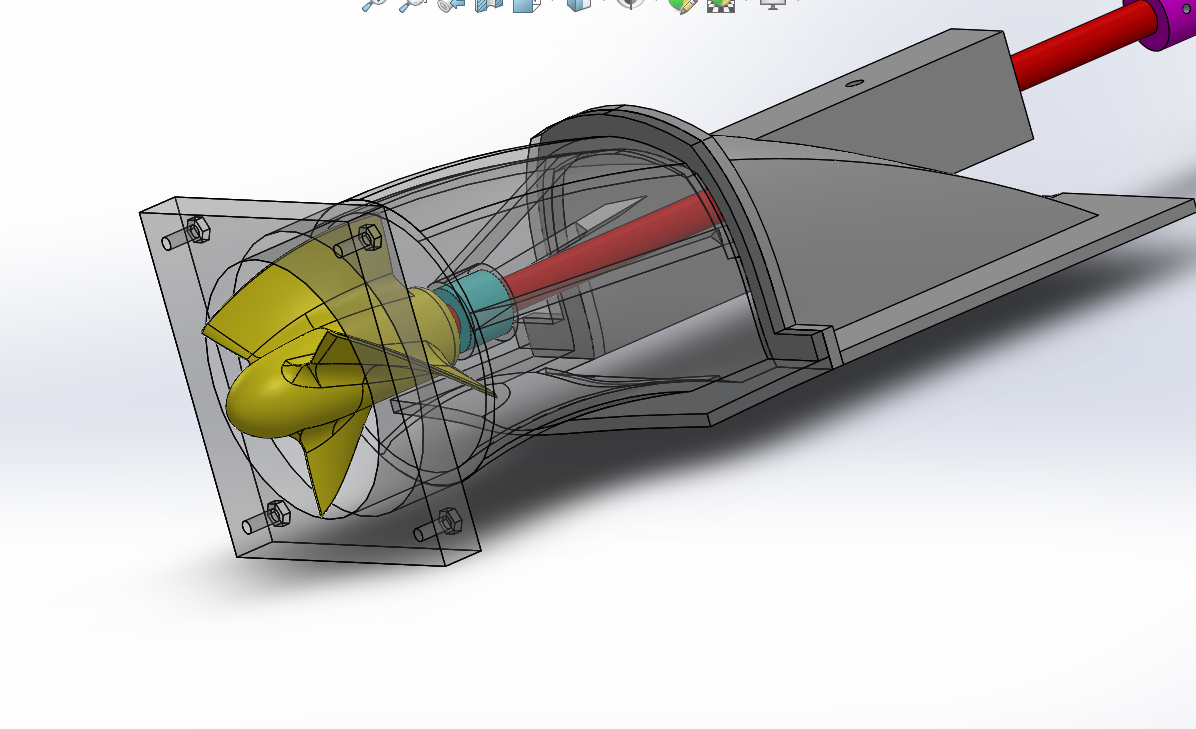
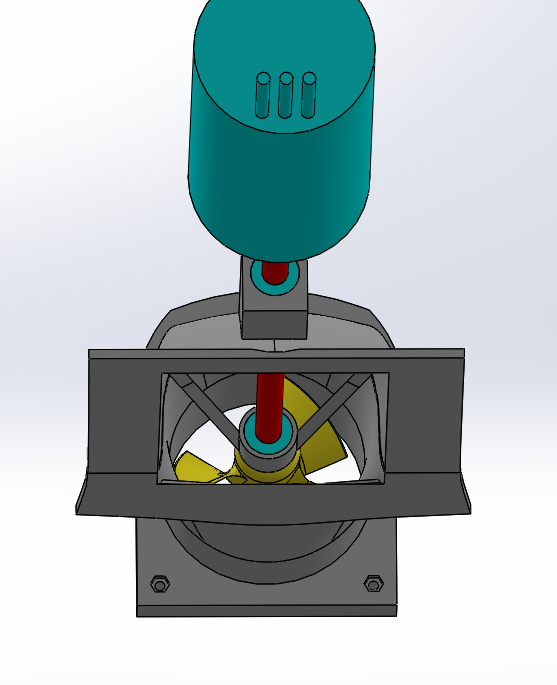
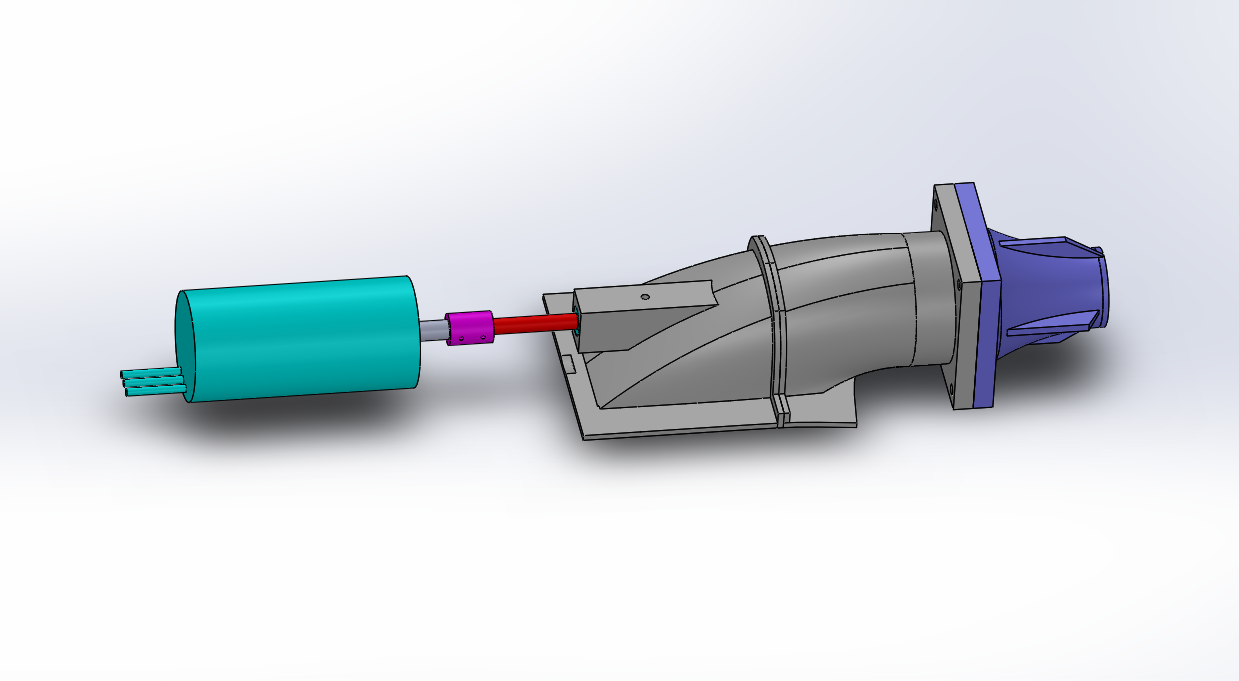
Here is my assembly. AS you can see, I had to break the main body into 2 parts so I would print more easily and not fill the middle with support material.
I’ve spent a lot of time on that design but am now thinking that a foiling direct drive C80/100 would be better and easier to get right with all of your help in here!
It’s a tough decision because I’m not old enough to be able to afford another ESC/Motor if something goes wrong…
My other jet drive system looks more complex but I think I am going to steer away from it because there is too much to go wrong.


5 Likes