How about a position sensor that kills the motor if a given angle in the X or Y axis is exceeded? Can build that easily into the radio set, if the board flips or is upside down, etc.
1 Like
1 Like


brilliant* like the way the collective thoughts are flowing,just seen your post,
i woke this morning thinking about a mercury tilt switch that would cut the power if the surfboard angle was beyond a certain point, to have something simple and reliable, planning to use a outboard engine propeller so it needs to be ultra safe if exposed
Some further thoughts on safety after watching videos where the foil board is accelerated without a rider and flips out of the water. This is done playfully, but shows a dynamic of action that could occur.
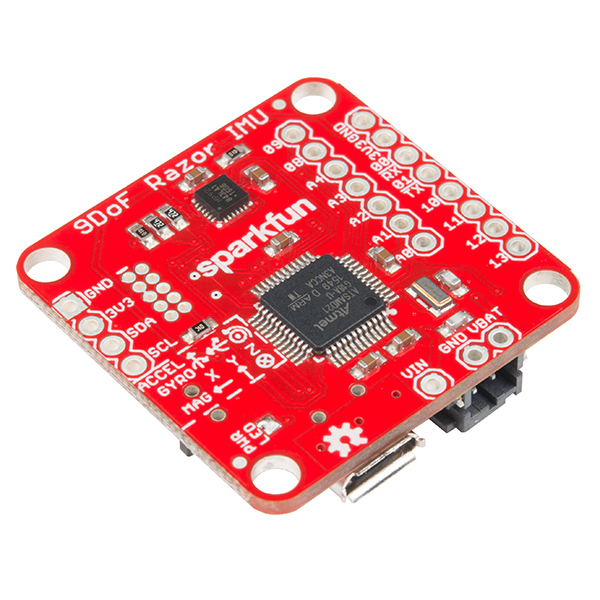
There has to be a short buffer in the radio programming loop to buffer short signal cutouts, and likely taper up for powertrain longevity and down ramps to prevent the riders from “going over the falls”. Yet the motor needs to be stopped as quickly as possible if off axis or flipping upside down. We will incorporate a board integrated IMU in the control circuit.
With an independent powered keel, unlike a wakeboard, powered flipping is possible. Leading edges of masts and impeller duct edges could be inlaid/molded with softer durometer PU possibly trailing edges as well. Softer formulations on the trailing edges due to structure.
1 Like
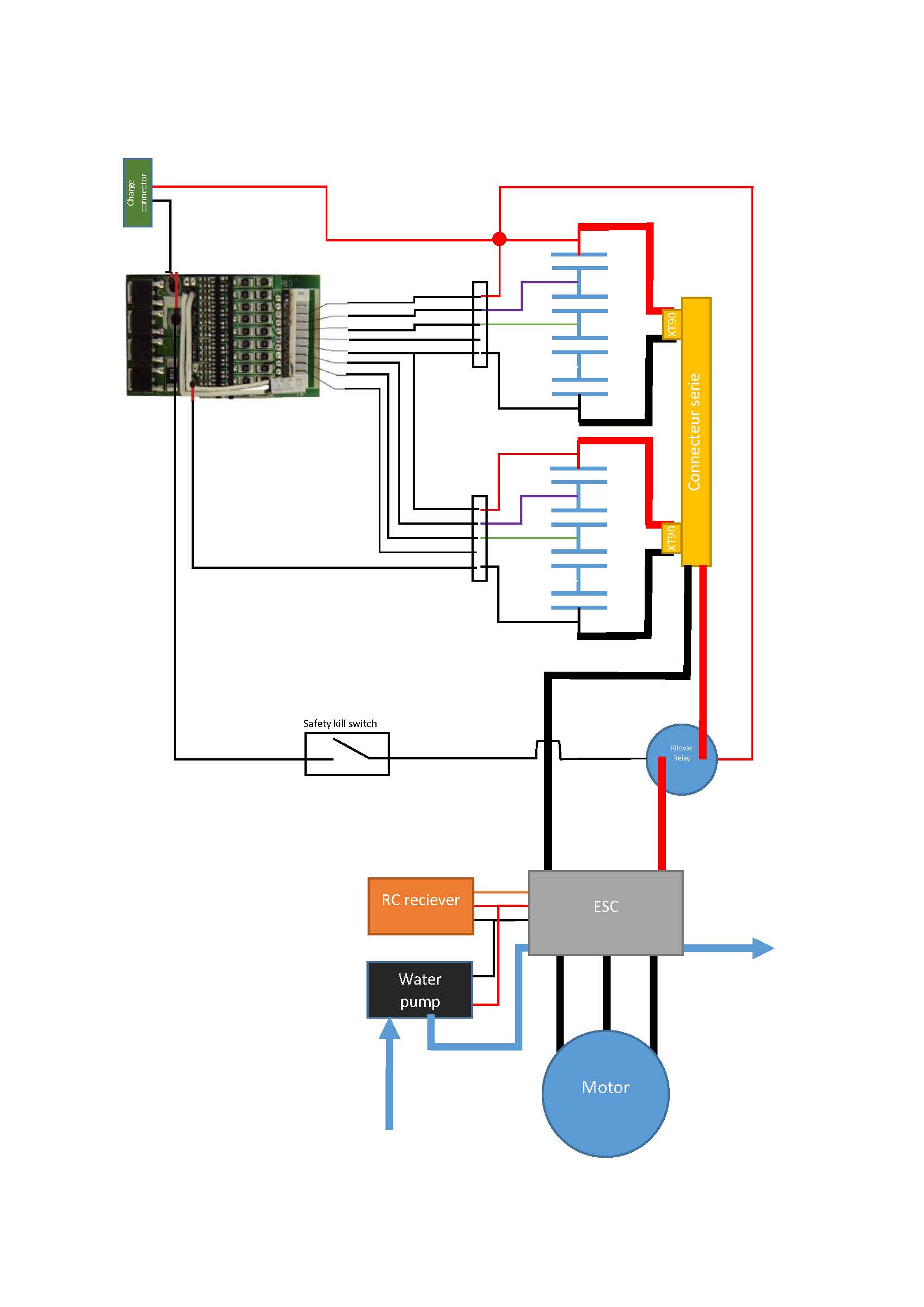
Kill switch update :
I did a modification on a waterproof NC switch to NO 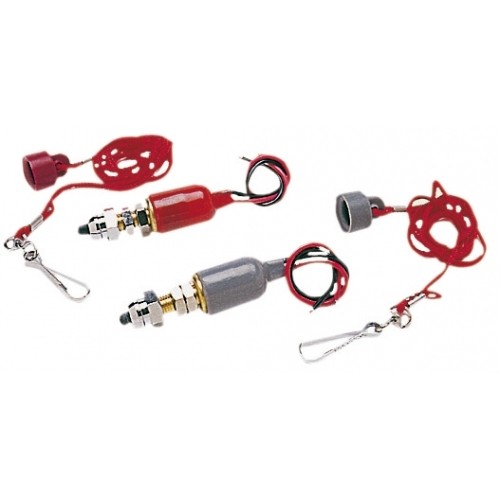


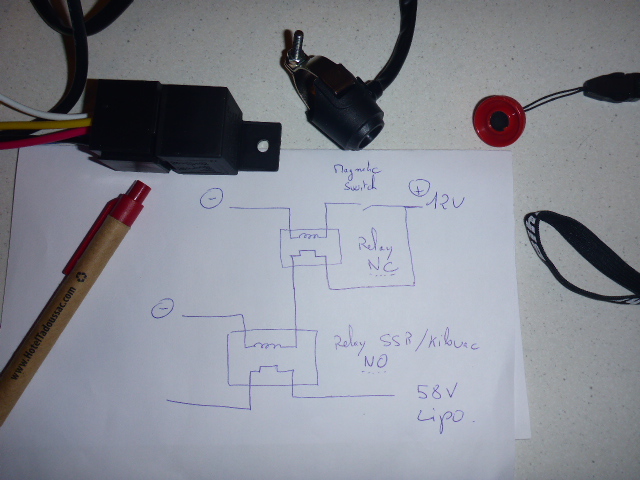
And for my second option with a magnetic switch with 2 relay
I’ll receive tomorrow the kilovac relay (there is 2 months of delay for the
SSR relay)
so I can install all in my old seahorse box for test before integrate all in the board
Nice @jeffM Could you please provide links to the Kilovac and magnetic switch you used? I cannot ring a magnetic switch on eBay and Kilovac relays appear to be very expensive (I guess we cannot avoid this). Thanks.
Hi Gregory,
links :
lev100a4 farnell
http://fr.farnell.com/kilovac-te-connectivity/lev100a4ang/relais-spno-12vdc-100a/dp/1436198
magnetic switch
https://www.amazon.fr/gp/product/B00NV21MVA/ref=oh_aui_detailpage_o02_s00?ie=UTF8&psc=1
small relay (reverser) and support
https://www.amazon.fr/gp/product/B00DUSLBV6/ref=oh_aui_detailpage_o01_s00?ie=UTF8&psc=1
https://www.amazon.fr/gp/product/B00CZ6OUW6/ref=oh_aui_detailpage_o00_s00?ie=UTF8&psc=1
I installed the first solution yesterday and all works fine ![]()
1 Like
It’s tough to find quality 8 Gauge wire that is over 1m in length. DO NOT buy the cheap stuff on ebay/amazon as that stuff is CCA (Copper Coated Aluminum). I did a ton of digging on that stuff and bottom line, its about 20% less efficient than a true copper wire when you are running high current. That stuff is for speakers sending quick signals to subwoofers and has a much lower melting point.
But I found competition grade copper wire 1650 strands silicone 200C grade at a great price - SUPERWORM
ACER Racing’s original SUPERWORM is the most flexible high-performance silicone wire available anywhere. Engineered using up to 1650 strands of tinned pure copper wire for low resistance and easy soldering.
Good Price and free shipping: Silicone Wire | Championship Quality | ACER Racing
3 Likes
I just bought this one on Amazon. Took me forever to find yes. Not idea why only the 1m pieces show up on Amazon. But it’s there and it’s the good 200C stuff: https://www.amazon.com/gp/product/B072N57DRQ
1 Like
Yup, saw that, but they don’t ship to Canada Eh! or internationally, where SuperWorm does 
1 Like
What are your thoughts on battery box/protection in case of  ? aluminum box, plastic box with batteries inside those fiber cloth bags?
? aluminum box, plastic box with batteries inside those fiber cloth bags?
And have you had you batteries submerged in water? What is the expected reaction? fire, swelling, just bubbles off the leads?
Cheers!
I cannot stress enough the importance of having a safe electrical system. From wire sizing, to batteries. It’s important not only for you, but your family and friends as these explode and burn homes down.
Two things on an eFoil are extremely dangerous:
- Propeller
- Lipo batteries - this post is about your battery bombs…
If you watch this video on lipo batteries you will quickly learn how dangerous they are. In fact, if you are using a plastic battery box and for some reason your battery shorts and explodes your box could explode and send plastic shrapnel everywhere, and with most battery boxes between our legs you can see the concern ![]()
I have asked a few times what people recommend for their battery box for safety, no one has replied yet, but from my research, just watch this video and you quickly agree that your batteries must be in a strong aluminum box, or at minimum inside a lipo safe battery bag within your plastic box.
WATCH VIDEO: https://youtu.be/0nrsoMsEMNU
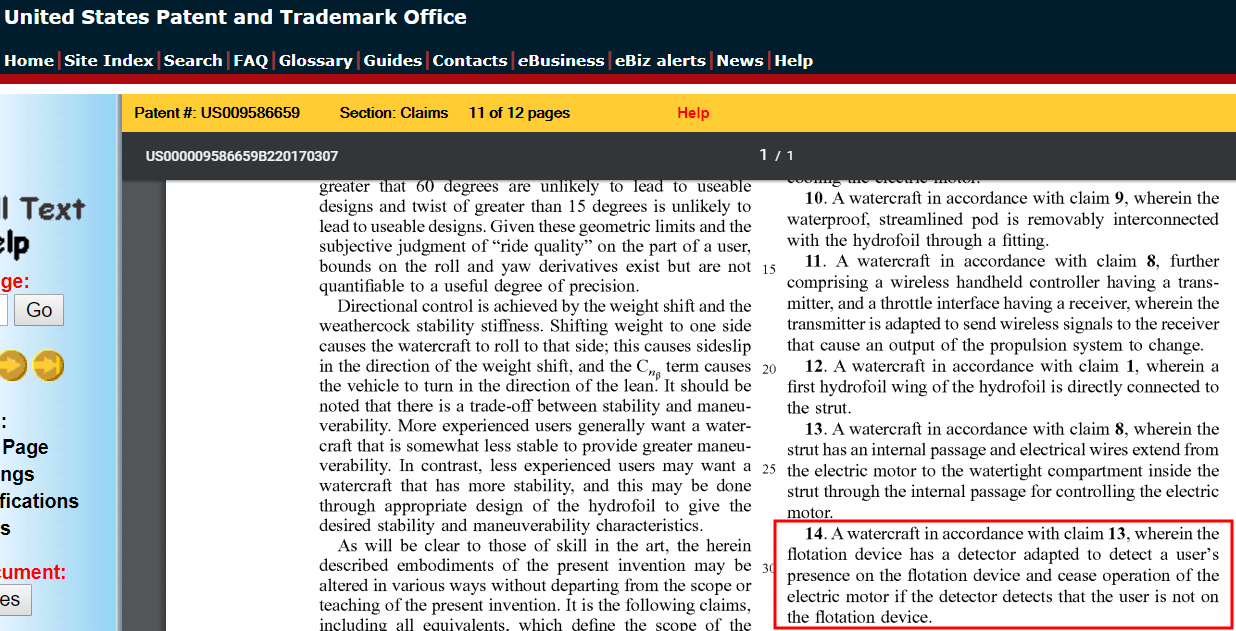
The US patent for electric hydrofoil in their CLAIMS secion uses something like this… see highlighted area…
To make the e-foil secure my plan is to have a MCU in the remote and the board using a ESP32 communicating through BLE. The one on the board takes input from a couple of sensors and throttle on the remote. It also controlling the battery level, ESC and the relay (maybe 2 relays, one for the spark eliminator and one for the main).
Sensors that I´m thinking of is, many of them are maybe great to have but not need to have:
-Some type of sensor to detect if the rider is in startposition
-Current sensors (limiting the ESC or detect failure)
-Voltage on the battery
-GPS (speed, distance)
-Axis
-RPM, maybe it could be done with a current sensor on the ESC motor output
-Temperature, ESC, Battery, motor, gearbox (one-wire)
-Ride hight and water depth, not sure what type of sensor to use. Right now I´m testing “Time of flight” sensors
-Load cell, to measure thrust, great to evaluate different props but in the end maybe speed and current will do
So if/how much throttle that will be sent to the ESC from the MCU would be based on the board status and the selected “ride mode”
Here´s some examples:
To be able to start the motor the board should be lie flat and the if it´s possible to detect the rider.
Depending on speed and ride hight the MCU maybe limiting the throttle. For example if you try to set full throttle from standing still it will ramp it up slowly. But it if you foiling in 75% of the speed then it may give full throttle.
Also the setting of full speed could be adjusted as you be need more power to get up foiling then you need later.
To protect the motor and gearbox max power could be allowed for a couple of seconds…but only using the “insane mode” ![]()
If the current suddenly deviate from the throttle input the power could be ramped down. It could be problem with debris or something else that in the end could be dangerous or expensive.
The opposite could also be interesting so if you foiling and suddenly the current goes down. I think normally this will happen when going up on the foil, the speed increase but the current stays the same or getting lower. So that could be one of the pattern to detect foiling mode.
As other people mention the axis could be used to detect if the rider falling of so then let the MCU cut the power or put in reverse so the rider will not fall on the e-foil…that would maybe be more dangerous.
In the beginner mode a fast throttle release could adjusted by the MCU to be softer.
The kill switch could be attached so it disconnect the power between the MCU and the main power relay.
Remote control will having a display with battery level, speed, settings. ESP32 having a built in “Hall effect” sensor that I thinking of using for the throttle but that maybe hard to implement in the design and maybe it will be easier to have a separate. Instead of buttons I´m planing to use the built in touch sensor support but I don´t know how it will behave in water. And of course the remote should be wireless charged.
As the ESP32 support wifi you could download the log to you computer or phone. And another great part with wifi is that you could program it over the air (OTA) without taking it out of the board. Of course with the risk that some hacked you E-foil ![]()
I´m thinking of have one relay for the spark eliminator wire to first load the ESC and then another relay for the main connection. Are solid state relays suitable for this application? I
Here is an SSR 120A but in the description it says when using with inductive load leave up to 7 times margin?
https://www.aliexpress.com/item/SSR-DC-solid-state-relay-120A-DC-to-DC-non-contact-switch-relay/32697383613.html?spm=a2g0s.13010208.99999999.305.paD6g5
I wonder long the ESC will run when cutting the battery input? I assume that this could have to do with how big the capacitor in the ESC are?
1 Like
Our new safety “system”. a reed switch KEY (see video)
The reed switch controls a super beefy relay that is directly connected to the batterypower cables. I have not tested it under high load, as it might kill the ESC… There will however be no problem to cut the power, (it´s a closed chamber coil switch with gas inside) it can handle 200A peaks, and 100A all the time. I think these type of switches normally are used as emergency stops for motor in machinery.
At the moment I use this as a on/off Switch for the board. But the ultimate safety would be to have a leash connnected to this, as this will stop the propeller in every single situation. The challenge is to do so without killing the ESC, which is pretty likely…
One of our ideas is to have a 2 stage leash (2 magnet switcher or similar) the first step would decrease motor speed (by triggering a microcontroller input to decrese speed, the second step would be to cut the main power… Assuming you normaly release the throttle when falling, this might work without killing the ESC.
2 Likes
Well done Hiorth, do you have a picture of your relay ?
On my side I found a switch NO. (the grey on the picture), no modification needed, it works when you install the leash

Super pricy$$$ and way overkill, an electric engineer friend of ours told us it was a typical Mechanical engineer relay and thought that was funny. He would suggest a solid state relay, cheaper and lower weight, but its hard to find 80-100A solid state relays.
Ok, we have the same, I’ll receive in 1 month a SSR relay for test
I found only one
http://fr.farnell.com/crydom/hdc100d120h/ssr-panel-mount-32vdc-120a-72vdc/dp/2425381?ost=SSR%2C+PANEL+MOUNT%2C+32VDC%2C+120A%2C+72VDC&iscrfnonsku=false&ddkey=http%3Afr-FR%2FElement14_France%2Fsearch
Even more expensive 