This is a WIKI post summarizing all the various drive systems that have been discussed here so far. I am sure I missed a few. Please feel free to update this post directly (I’ll make it a special Wiki post) and please feel free to add links to other posts and external references as you see them fit.
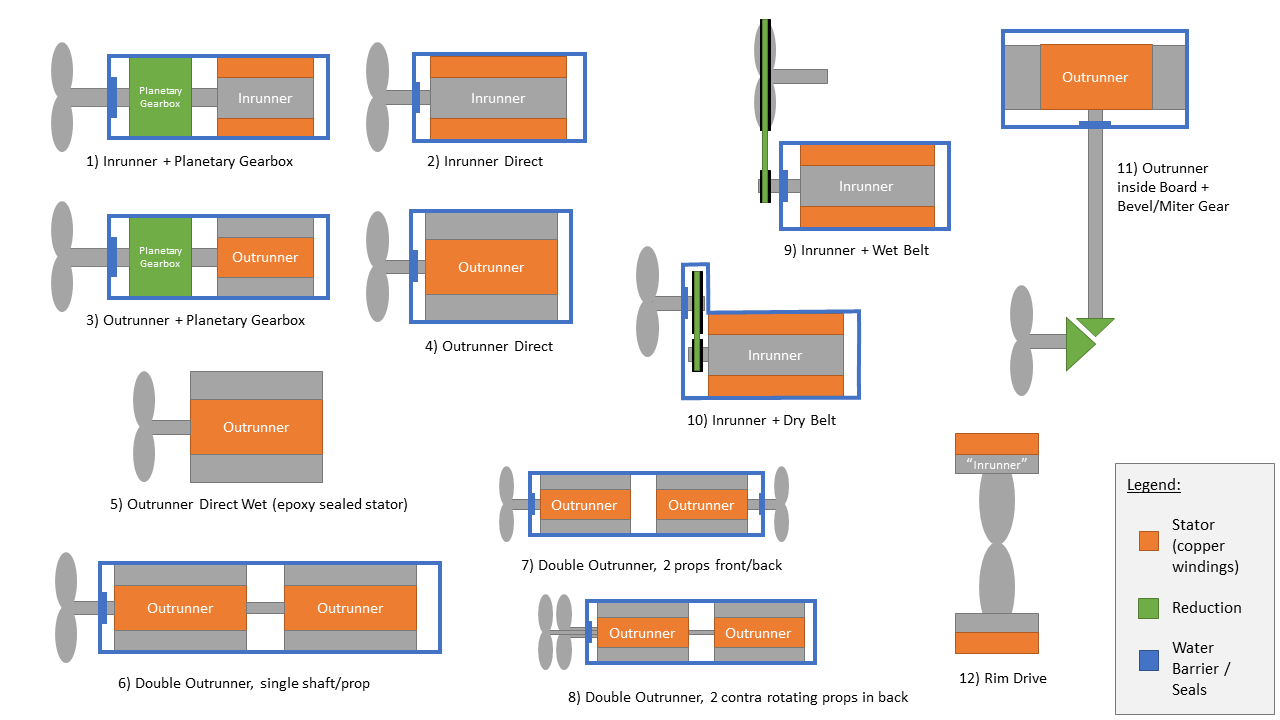
1) Inrunner with Planetary Gearbox
Pros
- High torque allows using large props (~120-150mm diameter)
- Good efficiency with larger props
- Manageable currents (between 15-50A) allows for cheaper ESC
- Inrunners around 500kv can be used
- Low drag with small(er) diameter inrunners
- Easy to cool
Cons
- Fragile planetary gearbox, not designed for fast constant input speeds
- Gearbox can be expensive and hard to find
- Additional weight, pod length and overall complexity
- High complexity (seals, couplers, bearings, gearbox)
- Gear noise
2) Inrunner Direct
Threads:
Pros
- Simple
- Quiet
- Smooth to ride
Cons
- High currents (can easily exceed 100A on start)
- Generally less torque with similar diameters
- Hard to make/find low kv inrunners motors with small diameters
- Reduced efficiency with smaller props or jet drives to manager higher rpm
3) Outrunner + Planetary Gearbox
Pros
- Planetary gear may last longer because of lower input speeds with low kv outrunners
- High torque allows using large props (~120-150mm diameter)
- Good efficiency with larger props
- Manageable currents (between 15-50A)
Cons
- Motor not easy to cool
- Bigger Outrunner diameter, more drag
- Planetary gearbox still a fragile component
- Planetary gearbox can be expensive and hard to find
- Additional weight, pod length and overall complexity
- Gear noise
4) Outrunner Direct
Threads:
Pros
- Availability of low kv Outrunners
- Lower motor cost
Cons
- Motor not easy to cool
- Bigger Outrunner diameter, more drag
- Generally higher currents, depending on prop size/pitch - requires better ESC, best with current limiting
- Efficiency loss with small props / jet drive
5) Outrunner Direct Wet (epoxy sealed stator)
Threads:
Pros
- Very simple
- Good cooling
- No shaft seals required
- Availability of low kv Outrunners
- Lower motor cost
Cons
- Challenging stator and magnet sealing procedure
- Motor bearing need to be replaced with ceramic or stainless steel ones
- Bigger Outrunner diameter starting from 63mm, more drag
- Generally higher currents, depending on prop size/pitch
- Efficiency loss with small props / jet drive
6) Double Outrunner, single prop
Pros
- Availability of low kv Outrunners
- More torque than a single motor allows for a bigger prop
Cons
- Cost – double motor, double ESC
- Pod length
- Cable/shaft routing may require special mast attachment design
7) Double Outrunner, 2 props front/back
Pros
- Availability of low kv Outrunners
- Twice the power ? Not sure
Cons
- Cost – double motor, double ESC
- Pod length
- Will require special mast attachment design with mast in center
8) Double Outrunner, 2 contra rotating props in back
Pros
- Availability of low kv Outrunners
- Torque on pod cancels out
- Supposable more efficient than normal props
Cons
- Complicated design
- Cost – double motor, double ESC
- Pod length
9) Inrunner + Wet Belt
Threads:
Pros
- High torque
- Possibly more robust than planetary gears?
- Cost
Cons
- Needs a robust pod/housing – might require CNC work
- Requires a belt system that works under water
- High belt speeds could be a challenge
- Additional drag from the offset pod
10) Inrunner + Dry Belt
Threads
Pros
- High torque
- Possibly more robust than planetary gears?
- Cost
Cons
- Additional drag from the offset pod and gear housing – likely more than with wet belt
- Needs a robust pod/housing – might require CNC work
- High belt speeds could be a challenge
11) Outrunner inside Board + Bevel/Miter Gear
Threads
Pros
- “Unlimited” torque by using large diameter pancake outrunners
Cons
- Motor noise and vibration
- Long drive shaft down the mast – engineering challenge
- Motor cooling
12) Rim Drive
Pros
- Minimal noise emissions
- Low space requirement - no shaft and no gearbox is needed
- Sealing of moving parts is not necessary, rotor and stator can be sealed hermetically.
- Since the blades are mounted to the rotor ring, there is no tip gap, reduces prominent source of noise
- Everything just sounds awesome in theory – can someone please build one?
Cons
- Reduced efficiency due to increased friction losses in the gap between rotor and stator
References
- Several posts in Propellers and Ducts - #17 by ELEVATE.rocks - Props & Ducts - FOIL.zone
- Rolls-Royce | Permanent Magnet Technology - https://www.youtube.com/watch?v=AZeWPlVoLko
– WIKI POST END –