Hi. I found this company Lehner Motors, they have 1 called 3080, it’s kv rang from 1050-131 depending on which wind you choose. it’s measurement is 60mm*122mm
In the lower kv’s it looks like they would make a good direct drive
1 Like
The supplier of the kort 80mm system confirmed that sss 360kv motor should be ok with this kort (considering 30v - 8s battery setup), so 10800RPM no load and around hopefully 7-8K under the load. So the system should provide about 27-30Kg of thrust in a peak point.
So I just ordered it to build this setup.
The supplier also provides the coupler to 10mm shaft diameter in the package.
I will appreciate if you can comment about 27Kg of thrust - is it ok for our goal?
1 Like
I’d just like to share my thoughts on the direct drive idea for debate:
Looking for a low kv motor is really only half the deal. In fact, it shouldn’t be very complicated to reduce the kv on any motor by rewinding it with more turns of thinner magnet wire.
But the maximum torque the motor can generate will not be increased by this measure at all. So unless you change to an inefficient ultra high-speed impeller jet design, the torque would only be 20% of what is needed. I think the motors currently in use already have more or less the best torque/weight ratio that is available. So the direct drive motor would weight 5 times that of the geared motor. Assuming for simplicity that the planetary gear that is added to the high-speed motor weights about the same as the motor itself, the direct drive solution would be about 2.5 times heavier.
Probably the best compromise between high efficiency+low rpm and low weight+high rpm would move towards higher rpm with the direct drive solution since torque is more expensive then and 4% of efficiency is gained by removing the gearbox.
I think despite added weight, the reduced complexity, improved drivetrain efficiency, and durability make the direct drive still very appealing.
1 Like
I think efficiency is each and every part in the system, such as prop and duct with a given rpm goal, the motor it self in that rpm work point related to the speed goal and transition to that speed. So it is a harmony of all of them.
I think @Lukas has some great points which agree with and is the reason we are designing a jet propulsion system vs prop. Reduced weight, reduced complexity, improved drivetrain efficiency, durability no solid shaft and impeller fewer couplers and now reduction gear drive, along with the fact the brushless motors have their best electrical efficiency around the 16,000RPM (small impeller speeds (52-80mm), plus the added safety and less drag are all very positive.
Less cost, less breakdowns even if my ride is 10-15 minutes less than a prop I think its worth it building.
I think it also heavily depends on what the longtime tests with the planetary gears are showing. Would anyone be willing to share how many hours of flying one particular gearbox has done?
Because I think for the gearbox to make sense, it would have to have a lifespan that is at least in the same order of magnitude as that of the batteries.
Also, I was doing this naive order of magnitude calculation estimating the numbers using Peter’s thread:
http://efoil.builders/t/peters-concept-bavarian-style/330/3
propeller setup:
600Wh Battery, 600W average power drain, 70% battery usage ->42 min
assuming to save 1 kg in the drivetrain without the gearbox and investing this in more batteries and assuming an increase in current drain by one third due to lower efficiency of the jet drive :
800Wh Battery 800W average power drain, 70% battery usage ->42min
Of course, the increase in Wh is a bit optimistic but maybe with a normal battery size, the flight time can be about the same with a jet drive if the weight saved with the gearbox and larger propeller is invested in a bigger battery. Maybe someone can do a similar calculation with more realisitc numbers and prove me wrong.
The extra batteries are probably cheaper than the gearbox and getting the weight closer to the feet should be good as well. However, in case one would choose to go for much more range with a larger battery the comparison wouldn’t look that favourable for the jet drive anymore. Also if one wanted to have multiple battery packs to swap, it would comparatively get more expensive and disadvantageous to go with the jet drive.
I could very well imagine that the best compromise is in between a 25k rpm direct drive jet and the 25k reduced to 5 k geared drive.
I would guess that the 16k rpm you are proposing does not bring big weight savings compared to the 25k to 5k rpm geared drive because I expect that about 50% more motor torque is needed. But it should be simple and reliable and the decrease in efficiency should be far less compared to a 25 k rpm jet.
Have you already found a motor with enough torque for the 16k rpm direct drive?
I’m looking into a custom motor that may work for direct drive for 56-80mm prop/impeller. But I will keep you posted.
2 Likes
sorry missed that. I weigh 183 pounds = 83kg
1 Like
Who exactly can measure the turns on the output shaft during the movement (the shaft is loaded)? What is the current and voltage? What is the gear ratio in the gearbox? Which propeller was used? Does anyone have this information?
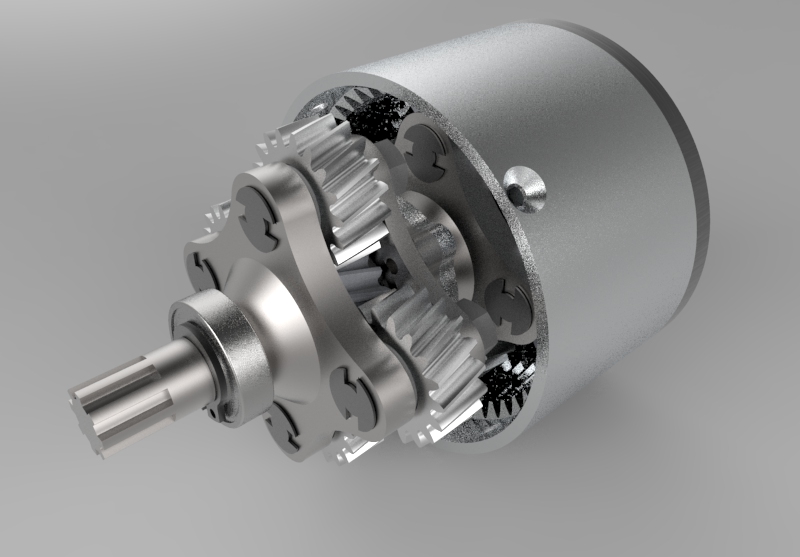
I would like to make a planetary gearbox. The first version of the planetary gearbox was designed, but it turned out to be incorrect due to incorrect initial parameters (32000 -> 2000 rpm = gear ratio 16: 1, two-stage reducer). I would like to know more accurate data under load.
Hi,
I am quite new to this topic, but I got experience with outrunners, ESC and Lipos from quadcoper building and flying.
You guys surely all heard of the VESC. If not, I would give it a shot. I has the VESC-Tool where you can adjust everything ( current drawn battery, current motor side, max rpm, speed up/slow down curves, fail safe and custom scripts e.g. for the controller or maybe a gyro-balancing support…)
It can do 50-60A continuously and up to 120A brust, but I read about people with water cooling working with 160A for ~0.5s. So I guess for me (~65kg / 145lbs) it should be enough.
Also almost all outrunners use delta wiring (how the pases are connected to the poles), I don’t know about the SSS motor, but if it also uses delta, you could easily change it to star winding and reduce the KV by a factor of SQRT(3) (=~1.7). So the 360KV SSS would have about 200KV then, times 44V (@12s) equals 9200rpm no load, which should be about the 7000-8000rpm load for the aliexpress ducted prop.
Voila direct drive with same motor.
It is explained at the VESC page of Benjamin Vedder, with a lot more information about batteries and motor, quite a lot and good information I guess: http://vedder.se/2014/10/chosing-the-right-bldc-motor-and-battery-setup-for-an-electric-skateboard/
So, did anyone already receive the SSS 360KV motor and can tell something about the internal wiring?
Or if there is any mistake in my conclusions please feel free to tell me early enough ![]()
Best,
Chris
3 Likes
I agree with you. I think that lifespan of gearbox and motor, as well as simplicity and total cost should be driving the design. 1kg difference in the system (battery or motor) is quite secondary when compared to the user weight. I mean, it is the weight of a wetsuit.
What is the best guess on the motor/ESC requirements for a direct drive system?
Did anybody consider a timing belt reduction system? It would come with some big design constrains (a big step away from a single tube) but it might increase lifespan (and serviceability)
Best
Giovanni
1 Like
Yes I have been thinking belts too. Works reliable and simple on the esk8, right? Why not here. Maybe something like like this. Or without belt gear-on-gear which would be less drag. What does everyone think? Worth trying?
10 Likes
Guys we are using impeller jet since the early stage and reduced rpm prop as well.
Both have advantages and disadvantages…
Impeller Jet we use is 82mm. See https://scontent-frt3-1.xx.fbcdn.net/v/t1.0-9/22279803_123134015061367_2393120729858456509_n.jpg?oh=24898d5715ac90c726834984c70197cd&oe=5A6F1E64
But above assumptions are not correct, we draw much higher values…About 3kw is realistic. Brings problems that these rc-toy parts are at their limit, so you need more expensive parts esp. ESC a.so. But you can reach higher speeds and more safe construction…
So the way pacificmeister and Nicolai do it is I would say more efficient and a bit cheaper… If you have enough battery and able to spend more on more expensive components then impeller jet makes sense;-)
Cheers
Jay
Elevate e-Foil Upgrade Kit
{kind=link}
1 Like
That design would have a great gyro effect on helping keep balance for pitch 
yeah, which comes along with a huge amount of drag.
Has anyone considered just having a shaft inside the mast and bevel gears at the mast-fuselage connection?
2 Likes
Hello Builders,
I am very new to this forum and since I am still in the “Idea-Collecting-Phase”, I like to start with a question.
Did anyone think about “magnetic coupling” as an alternative to the commonly used method for shaft sealing?
Would be very curious to see if such a system could cope with the required rpm/torque.
I found a very interesting and simple setup designed for RC submarines in a different forum:
“https://www.rcgroups.com/forums/showthread.php?1332679-Thrusters-types”
Regards
Stephan
1 Like
Hi Stephan
I had a think about it. I work in the water treatment industry and we use magnetic coupled pumps to transfer corrosive chemicals between tanks. The problem is that these pumps are generally about 3 to 5 times more expensive than a standard pump with shaft seals. For the e-foil application you can get a couple of shaft seals for around $10. Depending on the strength of the magnets I’d imagine they would be able to cope with torque as we pump some quite viscous liquids at reasonably high flow rates.
I think this would be more useful however for an RC submarine or ROV as the pressure at the depths they operate at can be rather high and it would eliminate water from outside leaking through the seal. With the e foil I don’t think this will be too much of a problem as it operates just below the surface.
Anyway just my thoughts though.
Cheers
Ben
It will work. Onean use it in theirs Carver.