Ive achieved (pretty much) success with direct drive, so I thought i’d make a new thread going over the build, and to show the video of it working!
Heres the video:
and if that doesn’t work, the link to the video: E-foil.mp4 - Google Drive
Its surprising how efficient and powerful it is, in this video the current was limited to 50a battery and 90a motor for each VESC. I know from my pool testing that the battery current never exceeds roughly 35A because the ESC is limiting duty cycle because max motor current is already reached, so this means that it maxes out at just over 3KW (stationary) the RPM would increase slightly as it speeds up enabling more power throughput.
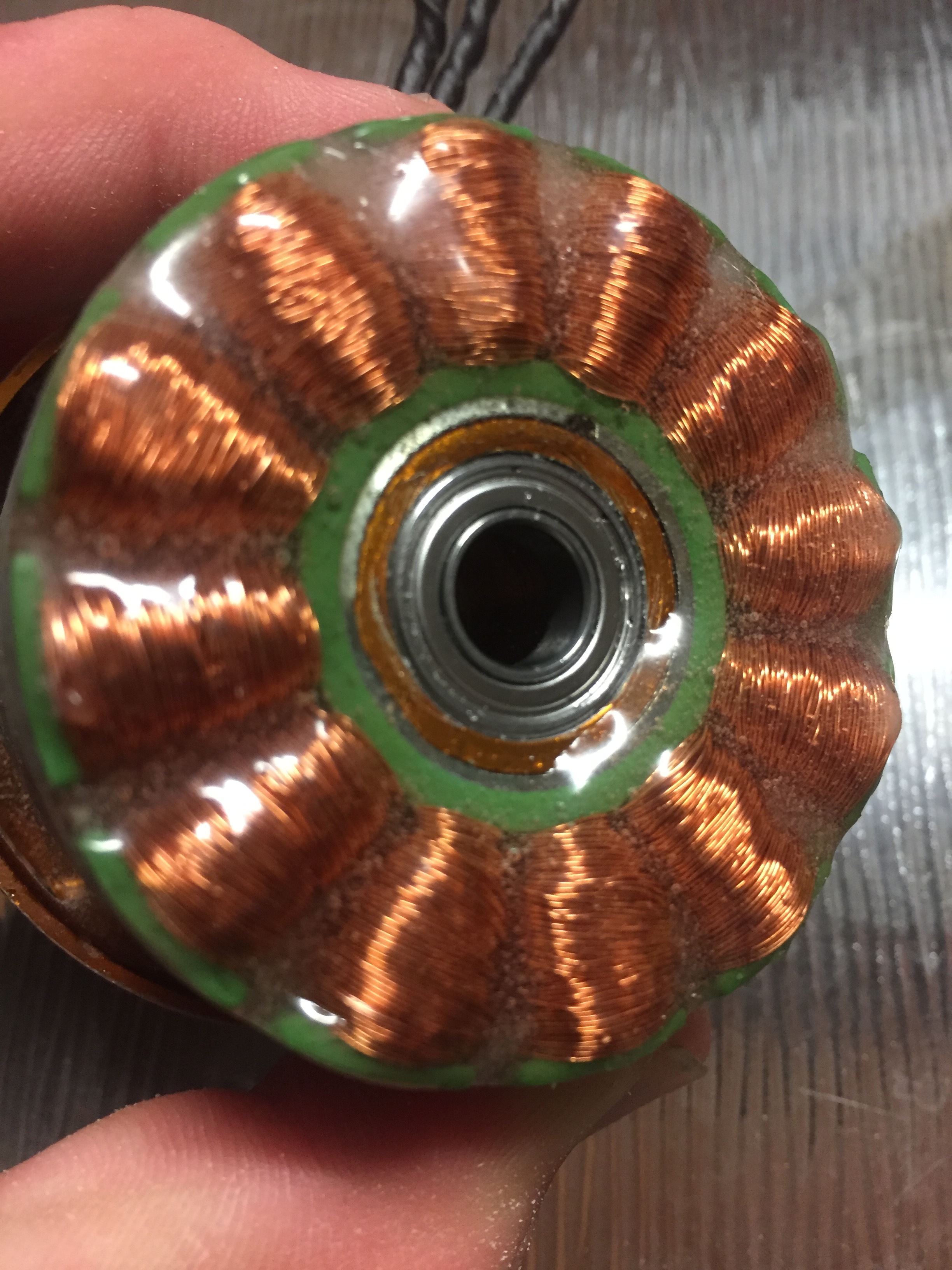
It uses 2 6364 190kv hobby king out outrunners they are only $60AUD each,
Here’s one of the motors epoxied with some 5 minute epoxy from the hardware store.
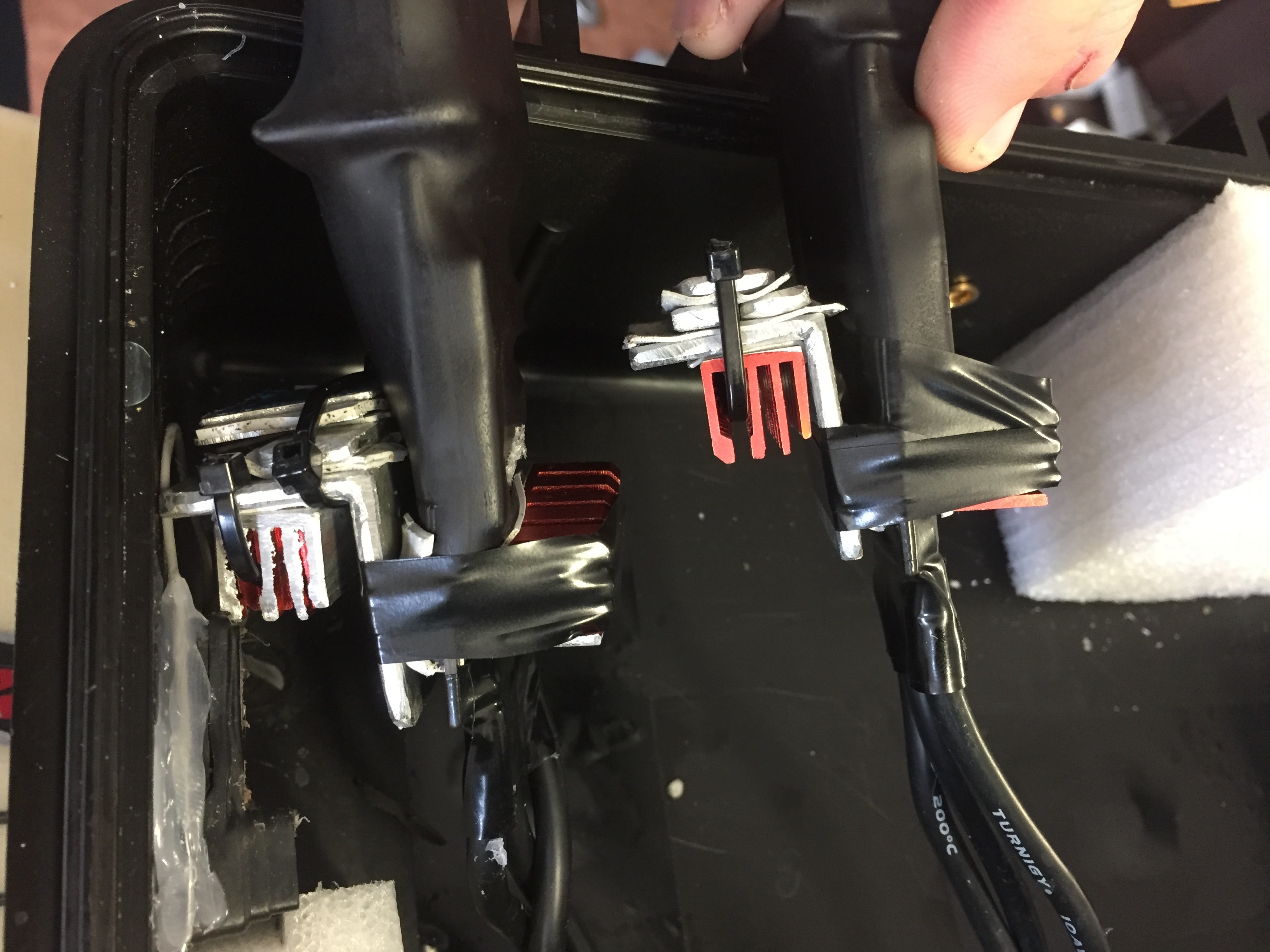
This is the motor system… About to design a duct, I thought I may as well test it first so i don’t make a duct for a bad prop…

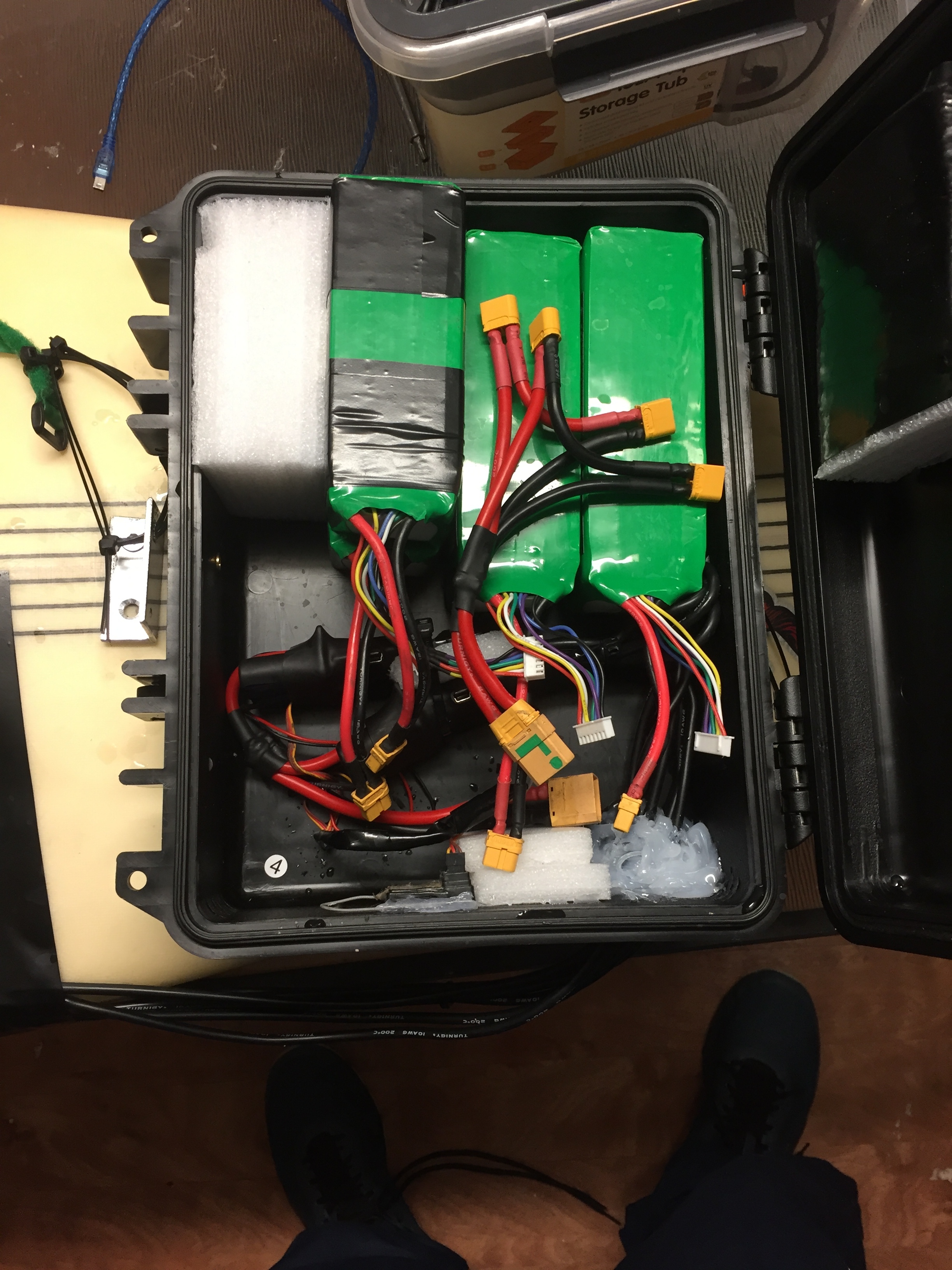
In the electronics box I have 2x 10AH 6s 10c and 2x multistar 6.6AH 10c in parallel to make a 16.6AH 12S pack. The ESC’s are VESCS, they are struggling to stay cold, they have absolutely no cooling whatsoever, I’ll have to sort something out there. They can only handle a minute or so of riding before I have to wait for a few minutes to let them cool.
I did increase the max temperature to 110C which is as high as it lets you set it, and that extended the run time a bit before the power was dialled back.
in the less than 10 mins total of crashing and riding, the charger put back into the batteries under 190WH still above 4V per cell which was surprising.
I still need to address: (order of magnitude)
- VESC overheating
- Riding skills
- Slight water leak
- More Buoyant board? I find it very hard to stand up when the remote is in my hand. Probably my lack of skill though.
Links to the parts:
motors: https://hobbyking.com/en_us/kd-53-30-high-voltage-brushless-outrunner-190kv.html
ESC: VESC 4.10
batteries: https://hobbyking.com/en_us/multistar-high-capacity-6s-10000mah-multi-rotor-lipo-pack.html and https://hobbyking.com/en_us/multistar-high-capacity-6s-6600mah-multi-rotor-lipo-pack.html
All other parts are 3d printed and I’ll post the fusion files here when I get my other computer.