Hello! I’m a novice, and never had anything to do with the boards, and hydrofoils. Interesting is your experience, you write that you were walking at a speed of 12-15 km/h, is this the maximum speed for such an engine? Do you plan to use hydrofoil? Is it enough for a hydrofoil? I was interested in http://alienpowersystem.com/shop/brushless-motors/c80100-outrunner-brushless-motor-80kv-7000w/ it is more powerful and the speed is closer to what is used in efoil’s with the reducer.
The drag is 60% higher with 80mm compared to 63mm. It would fit for a bigger prop, but that would add drag. Maybe it is suitable for higher weight.
The specs at alien are somehow weird. 6374 130kv says 10s max 80A max and 6384 130kv say 12s max 80A max which does not make sense to me, as a longer motor should have more copper to take more current and a shorter motor should be mechanically stiffer, allowing higher RPM. So its somehow contradictionary. Anyhow, the 6384 has a little more space between the windings, making it easier to cool. I estimate 100A phase current permanently for the 6384 if run underwater, so it has power up to 4.4kW.
At the moment i do not plan to use hydrofoil, maybe some hybrid integrated to the duct.
12-15km/h is not the maximum speed given by the motor and prop configuration, this was due to current limitation by the VESC-X.
For outrunners running underwater without reduction gear i recommend a controller with phase current limitation.
Maybe you find a configuration with a prop with less pitch, suited for 130kv and 44V, so you dont need phase current limitation.
1 Like
If you are going to attempt an out runner from alien I would suggest going with the water cooled version. The one you are looking at is for an airplane and gets cooled by the prop thrust !
Cheers, David.
1 Like
Those batteries are sexy haha! Where did you pick them up?
Maybe you misunderstood something, i have built a motor from an Alien 6384 outrunner which runs completely under water, so the windings are cooled extremely well. Swapped the bearings to stainless with ceramic balls and good sealings. Scroll up and read. Batteries are 6pc. High Capacity 4s 16Ah, 1.4kWh from HK.
2 Likes
Yeah I was misunderstood ha! Sounds awesome 
How much thrust did you get with this setup? Thats a big motor, do you have photos of your rig 
Have you tested this setup yet? I curious if a 3300w can turn a prop that size going direct drive.
For[quote=“VeFoil, post:27, topic:362”]
How much thrust did you
[/quote]
In order to have an efficient motor/prop system, I think either go with a smaller motor with a gearbox or, you go with a larger diameter motor to get more torque. I chose to go with a larger, direct-drive motor. My thinking was that with a nicely shaped enclosure of minimal wetted surface area, the drag would be comparable to a much longer smaller diameter enclosure required for a gearbox system.
I hope to have test data before long. I’m also thinking about buying the Alien C80100 50kV motor. Compared to the motor I’m using now, the Alien motor it is longer, heavier (almost twice) and lower kV. I’m hoping it will create more torque than the Leopard 8072 I am using at this time.
I am also intrigued by the magnetic gear reducer shared by someone else ( I can’t find the original post) in this forum. If it works as advertised it could make the small motor with a reducer more attractive to me.

2 Likes
Ingenious, this pdd is revolutionary. We should build this from parts of different motors.
Are the PDDs even proven or for sale commercially? It just seems like a new, unproven technology when I look into it.
You are right, this system is revolutionary, but it is not said that you gain higher power per weight or per volume in a pure motor application. Only torque. And this means you are able to move larger props with less hub diameter. And of course we all want this. We want to reduce the ratio Hub/Prop to minimize the induced drag of the motor and hub area.
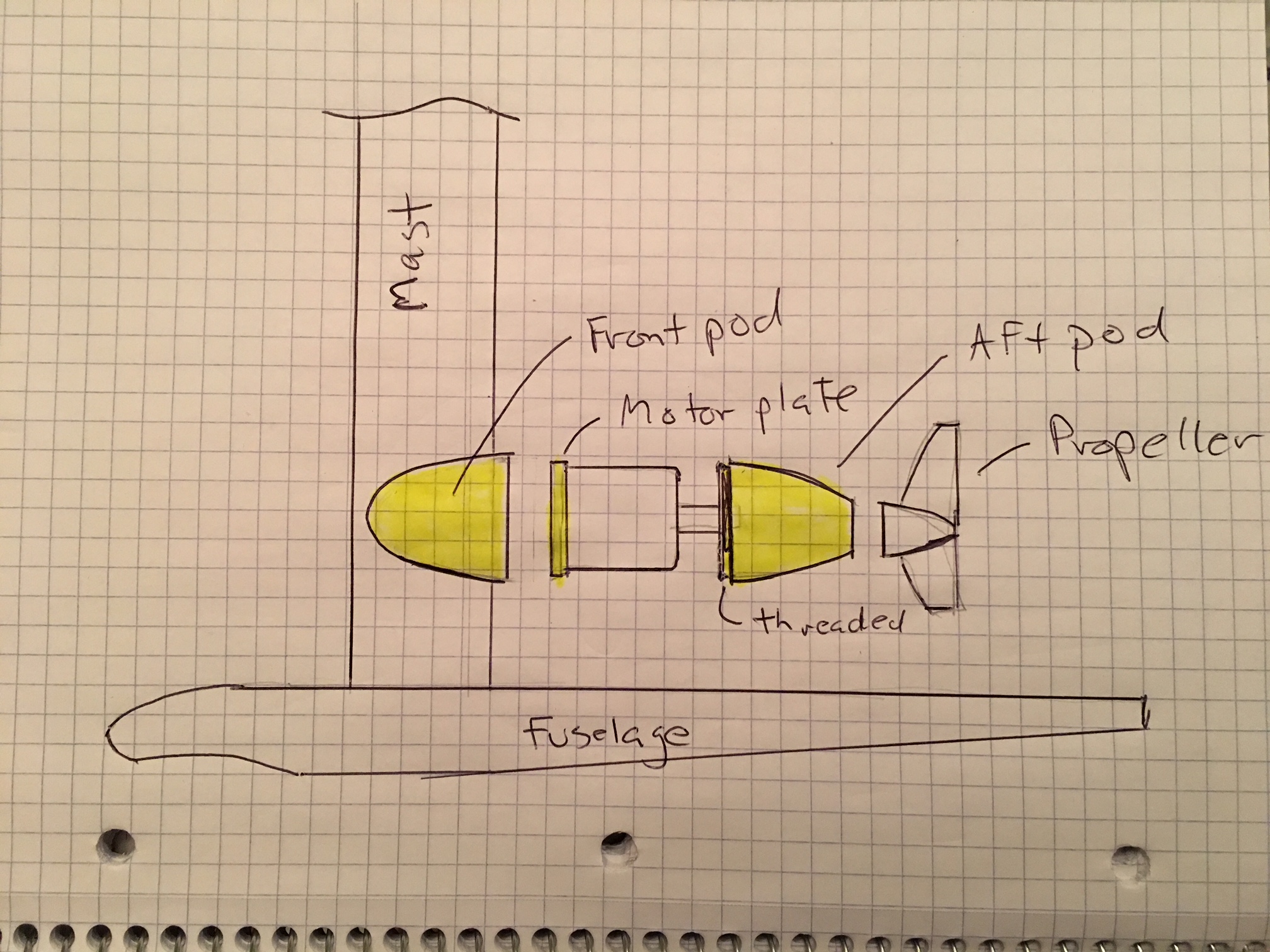
Here are my thoughts on a direct drive motor pod. As seen in the sketch below, only 3 parts:
- Front pod bonded to the mast. The front pod is only long enough to cover the wires where they go into the mast
- Motor plate which will get clamped between the front and aft motor pod sections
- Aft pod threads into the front pod. The aft pod contains seal and bearing as required. the aft pod will also have an O-ring where it mates to the front pod for a dry motor set up.
Simple, compact, clean.
3 Likes
95%+ of the drag is from the “front of the pod”. If you have 20cm or 80cm long enclosure is almost the same.
So Winging_it and I did a test tonight and got some good results from it. We took the pod and mast that we have been testing with and did a test in my pool with the motor dry and then with it wet.
The motor is in a fiberglass pod and all of our testing so far has been with the motor dry.
Our test started with the a run in air and the results at full throttle on a 12s battery are 7amps and 350watts.
Next we tested it under water with the pod sealed. The results from that run are 60A, 2100w and 35lb of thrust.
Now we allowed the pod to fill with water. The results are 70A, 2170w and 33 lb of thrust.
Lastly, my pool is round so we ran the system at 1/2 throttle for a while until the water was circling the pool at maybe 5mph. The results for this test are 60A, 2100w and 31lb of thrust. We rightly expect these numbers to keep dropping especially once on the wing and able to back off of the throttle.
We will be testing further but believe that because the motor was in a closed flooded pod that the current draw increase due to running wet is reduced from just running an open flooded motor.
Comments are appreciated.
4 Likes

did you made the test with Leopard 160kV ?
Which alien motor did you order?
The motor we have been using is the Leopard 8072 - 160kV. The motor that was just ordered is a C80100 - 50kv.
1 Like
Nice Test, very good, bravo.
Are you confident about the added power loss?
Were you able to measure the winding resistance and thereby estimate winding temperature? Can you use a sensor inside the pod?
I had bad experience with a rather closed housing, i suggest to let some water flow through the motor windings instead trusting the heat transfer by the can and the additional housing. It does not need to be much. If you scare the microbes or sand, place a groove filter with a magnet in the inflow. 1 liter/minute would bring the outlet temperature low. You could also use the outlet water from your esc to flow into the motor afterwards. so its already pumped and cleaned, maybe a little warmer. If the motor itself can act as a pump? creates suction to suck water from the ESC. And ESC sucks water from an inlet with some filter.