Nice motor, what are the power specs? Is it sealed?, made for use under water I assume?
, absolutely no point changing to ceramic bearings if they never are in contact with water. If you get water inside your motor you might have a benefit running ceramic, but on the other hand having water between the stator and the rotor is not good (except maybe for cooling).
epoxy is an excellent sealing material, there are some other alternatives like plasti dip, that works well on most electronics. A combinations might be good?
if the power output is high enough(2-3 Kw) I think it will work. Even dough it produces a lot mot drag.
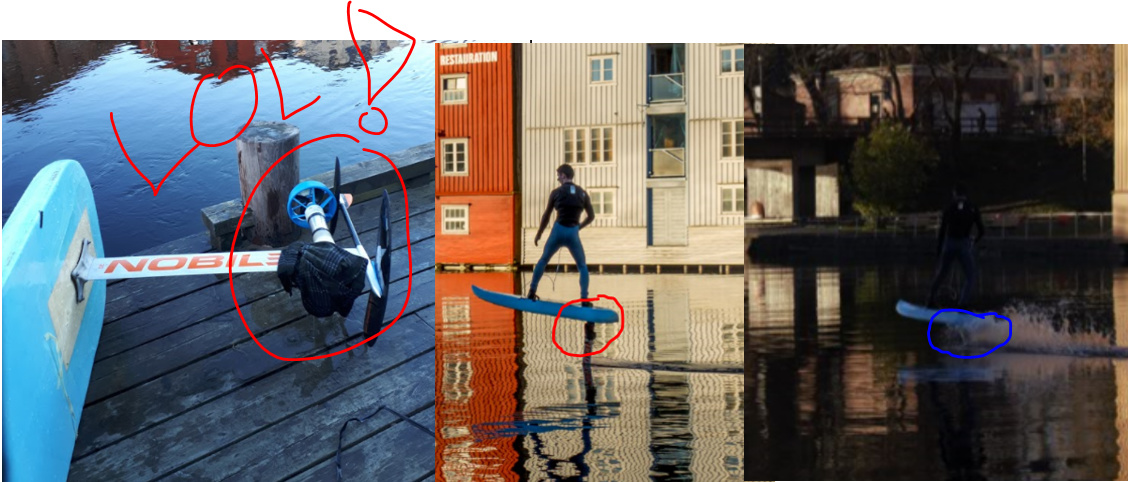
when it comes to drag with a big motor, it is not ideal. But if you have enough power it will work! Here is a funny example I accidently E-foiled the other day with a scarf rapped around the mast.(dont ask:stuck_out_tongue: ). Definitely increasing the drag! It worked as you can see on the pictures to the right.
Propulsion unit is the V1 unit, that several others might be using here on the forum.
It is very nice and looking water dynamic unit as per my vision. Is it something you have @Johannes? What is current purpose and installation of it? what are parameters? KV? Power? Prop size? Looks very nice design to be underwater direct drive.
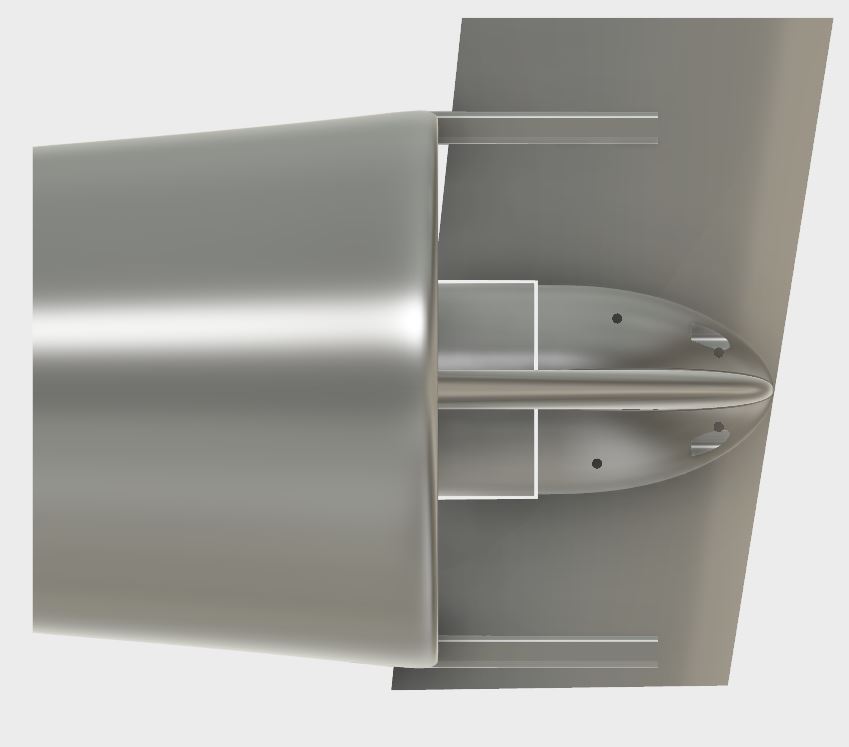
Currently i am working at the design for the new 14cm prop. Its the same prop as before but i will cut the diameter down from 18cm to 14cm. In first design it was 17.5cm. But i think the shroud and everything is too large.
I use a fin from a windsurfboard and make some cutouts for the motor and the wires (latter not visible in sketch).
The parts for the shroud i print in PLA and glue them with UHU hart. Additional there will be bolts.
I did not use any specific profile for the shroud, but just used splines.
If someone likes to contribute to the design, i could release the drawings in fusion.
Hi @PowerGlider, Great design! Im going to build the same as a first setup with the board with 6374 sk3 140kv from hobbyking. Do you think it can be adapted to your design? I will appreciate if you can share it so I will move on from this.
So far i am not planning any mast, this is kind of a trainers board supporting windsurfing kids. If they fail to get back in changing winds we swap the boards on water and i have the job against the wind.
Maybe later i will build a custom mast. I have no experience with driving foils, but i can surely build them.
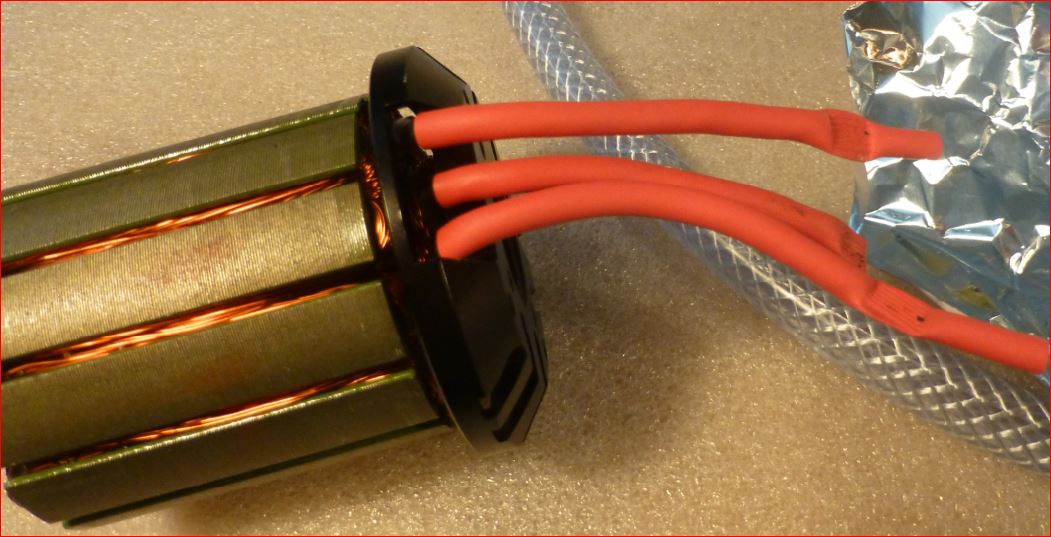
The uncased motor worked in hyeres and stockholm with different configurations of ESC and motors.
For electrical safety it is important to have no connection from the battery or ESC to the water. So i put some effort on this, e.g. watercooling of ESC is not allowed and there are no screws or any metal parts between inner and outer of battery/ESC housing. There is some failure in the interface of motor to the leads due to the construction of normal outrunners as they come out of the box. It is almost impossible to improve the situation because of the interface between stranded isolated copper and flexible leads, the soldering beeing covered by heatshrinktube somehow but not perfect. And all this sits between the aluminium hub and the stator. Hope we will overcome this issue with new 6384PowerGlider which you can disassemble. So the goal is, to have a double fault before any harm is done. Avoid the single fault by construction and design. Prove there is no single fault by checking before driving. Build an interface from battery box to motor which is proven by design and use. Isolate the motor windings and their solderings by additional measures like vacuum epoxy treatment.
I use a lot of industrial and available components to do so. I do not need to make everything myself from scratch. Like a prop, fin, mast or board or casing. And i do not have to invent everything myself.
But sometimes i need to dig into details:
Thanks for great info! I meant to start with no hydrofoil but surf drive as you do, this is the reason I asked your motor mount design you designed in fusion to adapt it the sup fi
n to be installed on surf board.
Thanks again for your great experience sharing!
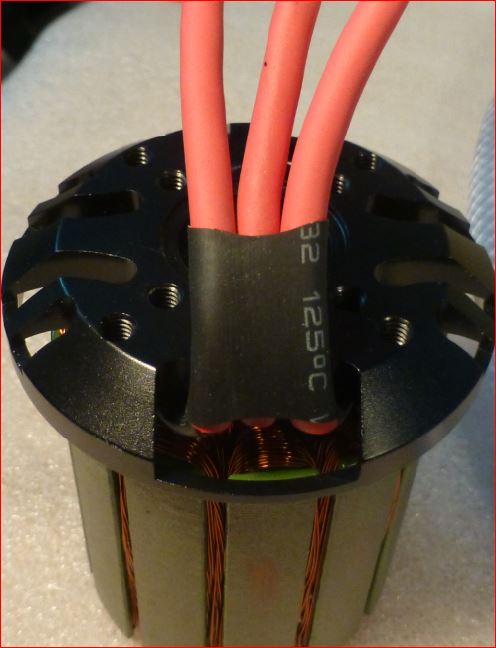
The stator iron has a length of 56mm instead of 50mm, the complete motor weighs 1050g.
Tomorrow i plan some electric measurements.
In the next days i start a photo series how to apply epoxy to stator and rotor.
If you have questions about details to be photographed, please ask here.
Awesome. Looking forward to hearing how it works. I have been trying the 5065 running in oil and just cant get enough power out of it. Been debating whether to make the jump to a 63mm or all the way up to an 80 (which obviously has a huge form factor). How long did it take to arrive from the time you ordered it?
Just tested with VESC: 95% Dutycycle at 46.3V and 32000 electrical RPM / 7=4571 RPM.
4571 RPM / (46.3V*0.95) = 104Kv in BLDC mode.
With FOC it was 29900 eRPM giving 97Kv.
I also measured the Phase resistance with multimeter and a 20A current source, 1.098V was the drop, so its 55mOhm. VESC generally shows half of the value.
I also tried to estimate the winding area of each phase by measuring wire thickness (0.35 … 0.4mm, 28 wires) and weight (0.25g/cm), each phase has around 2.8mm^2.
To make a plausibilisation, i took the old 6384S 130Kv stator and used it with the same bell and VESC and everything was the same:
37800eRPM BLDC --> 123Kv
35050eRPM FOC --> 114Kv
R measured manually 0.98V at 20A, 49mOhm.
No load current at full throttle was almost the same for both, 1.8A.
With these data we can make a simplified estimation of the RPM, eta and so on:
Lets start with the making of epoxied stator.
What we want: Make the stator iron and windings waterproof by filling up all cavities and wetten all surfaces with epoxy.
What we need:
A vacuum source (see above to get some examples),
a vacuum chamber
some hose OD 12mm ID 8mm, a thighting ring with ID 17mm,
Isopropanol 99% (from pharmacy) to prepare the stator
an M20 IP68 PVC cable clamp to adapt the hose to the lid
an electronic balance with accuracy better than 1g (kitchen balance might be too bad, check before use)
some gloves, stirring tool, a one way cup for mixing epoxy,
special epoxy with low viscosity and long geling time like Epoxid-Gießharz WASSERKLAR + Härter W 300 | R&G Faserverbundwerkstoffe ,
Prepare the stator with Isopropanol using the marmelade glass with the intact lid. Shake and roll it for some minutes, so all grease and oil is removed which might have been used during production.
Pour the isopropanol into an other container, maybe you can use it once more. Do this in fresh air so you dont get dizzy. Use gloves to handle the stator from now on, so the fat on your hands is not getting on the stator. Let the stator dry for half an hour in dry, warm condition. If you want to be absolutley sure there is no water left, put it in an oven at 50°C for half an hour.
Clean the lid with soap and water, let it dry. Mount the hose with the cable clamp. Use a rubber ring for thightening on the outside of the lid, ID 17mm. Do not tighten too much, otherwise the rubber ring is sqeezed out. Do not use any additional washer, this will make it untight.
Apply heat shrink you can pull off again later if you want, i use it to prevent cables being glued together forever. Close them by using a gripper while they are hot.
Wear old cloth and put gloves on, use tissue to wipe away dripping epoxy.
Now mix the epoxy, i needed 150g, use 170g for safety. With the superprecision balance i can only measure up to 100g, so i needed to mix twice. Use a calculator and make sure you get it right! Some balances shut off after some time, make sure you know the weight of your empty cup. 1% accuracy for the mixture is good enough, dont panic. Mix and stirr it at least two minutes. Pour the resin into your vacuum chamber where the stator is already placed. Note the time, 16:20h. From now on you have 5 hours pot time and 10 h until the geling starts. Plan for the next 10 hours.
Make sure your vacuum chamber has a good stand, put on the lid and let the hose stand vertically. Use a long hose and make it go in spirals so no epoxy can reach your fridge compressor. The epoxy will be foaming when you apply vacuum and climb up a bit into the hose. Let your fridge compressor run until you see no bubbles coming out of the stator any more, which is normally taking 60 minutes. Wave the vacuum chamber around to let the air trapped beneath som cavities to get up and out. Now, do not switch the compressor off, it might take a long time until you can restart it because of the so called clixson, which is a device modeling the temperature of the compressor. You might use a fan to cool the compressor and the clixson. If the compressor switches off, dont panic. Cut off the power, let it cool down, normally after latest 30 minutes you can switch it on again.
Instead open the vacuum by pulling off the hose from the compressor. Let rest 15 minutes without vacuum applied, so the epoxy is sucked into cavities and can distribute.
Now apply vacuum again until no air bubbles proceed, which is normally taking less time than in the first run.
Do this over and over again until there are no air bubbles visible when applying vacuum.
Now you can decide how to proceed and plan your time. You can warm it up inside the chamber to speed up the process but be careful not to miss the best time window for taking out the stator and hang it up for dripping.
Flip it over from time to time to allow a homogenous thickness distribution of the coating.
Clean the bearing seatings with tissue from time to time. The threads are not endangered you can recut them with a tap after curing. Maybe you want to clean the leads heat shrink tube as well.
If you are satisified with the thickness use a hairdryer or an oven to warm it up to 50-80°C and speed up geling so the resin cannot run away and thin out the coating. Keep it at this temperature for the next 10h.
I should have done degassing before putting the stator into the epoxy. Instead of pouring the epoxy ungassed over the stator.
After cleaning with isopropanol i should wait much longer at elevated temperature.


 .
.