Thanks! The issue there is the alignment, forces and space for sealing. I think it best to isolate the motor with a flexible coupling that can handle some of the imperfect forces due to machining tolerances and working forces. Right now the design has three bearings on the shaft, two to stablize around the seals and the third open at the outside end after the toothed pulley, three mating sections structural section traverse the shaft length. The propeller shaft should be well supported by the intake grate and stator stages. Those parts are going to be CNC alloy.
Luckily the loads acting on the shafts are easy to calculate it would be nice to know the required torque on the prop.

1 Like
I dont understand this concept, i think to much unnecessary components are elevated the resitance…
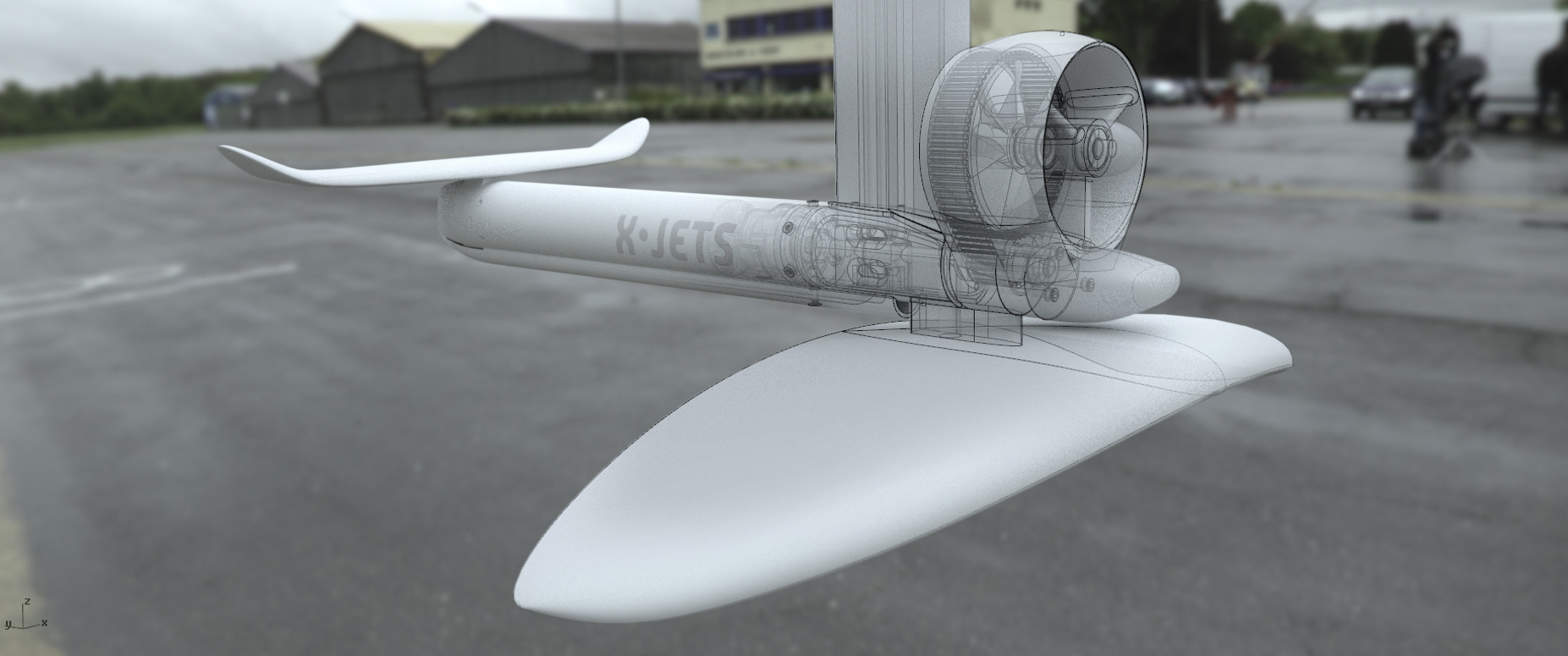
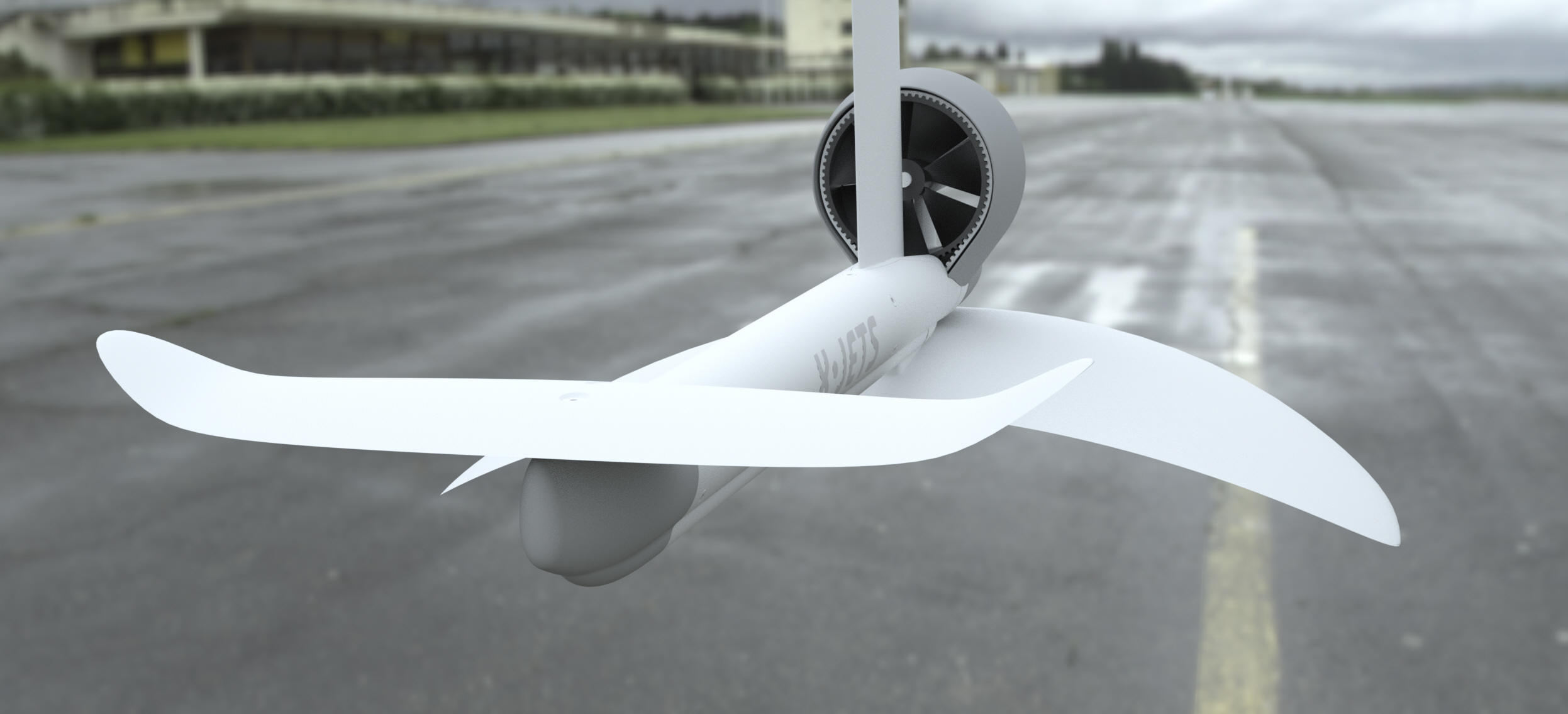


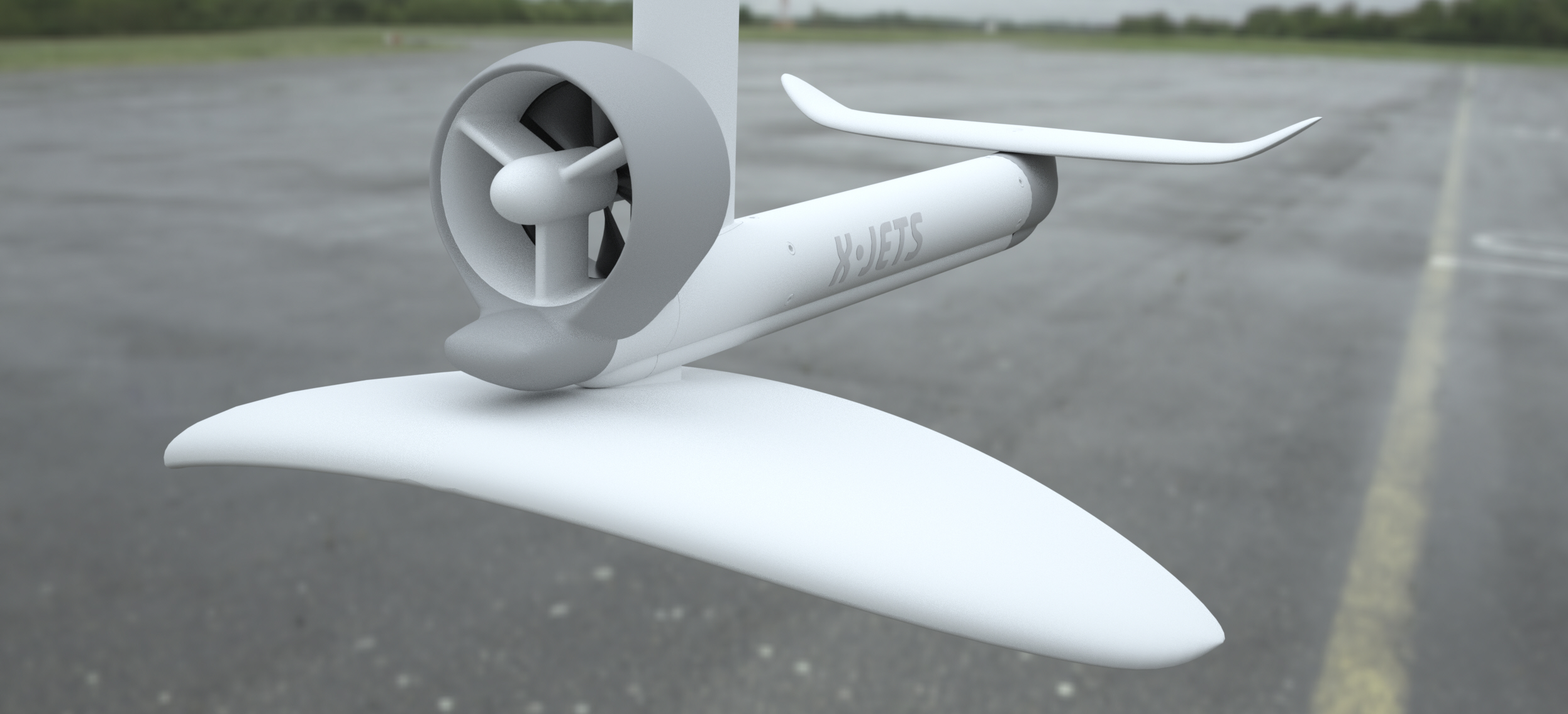
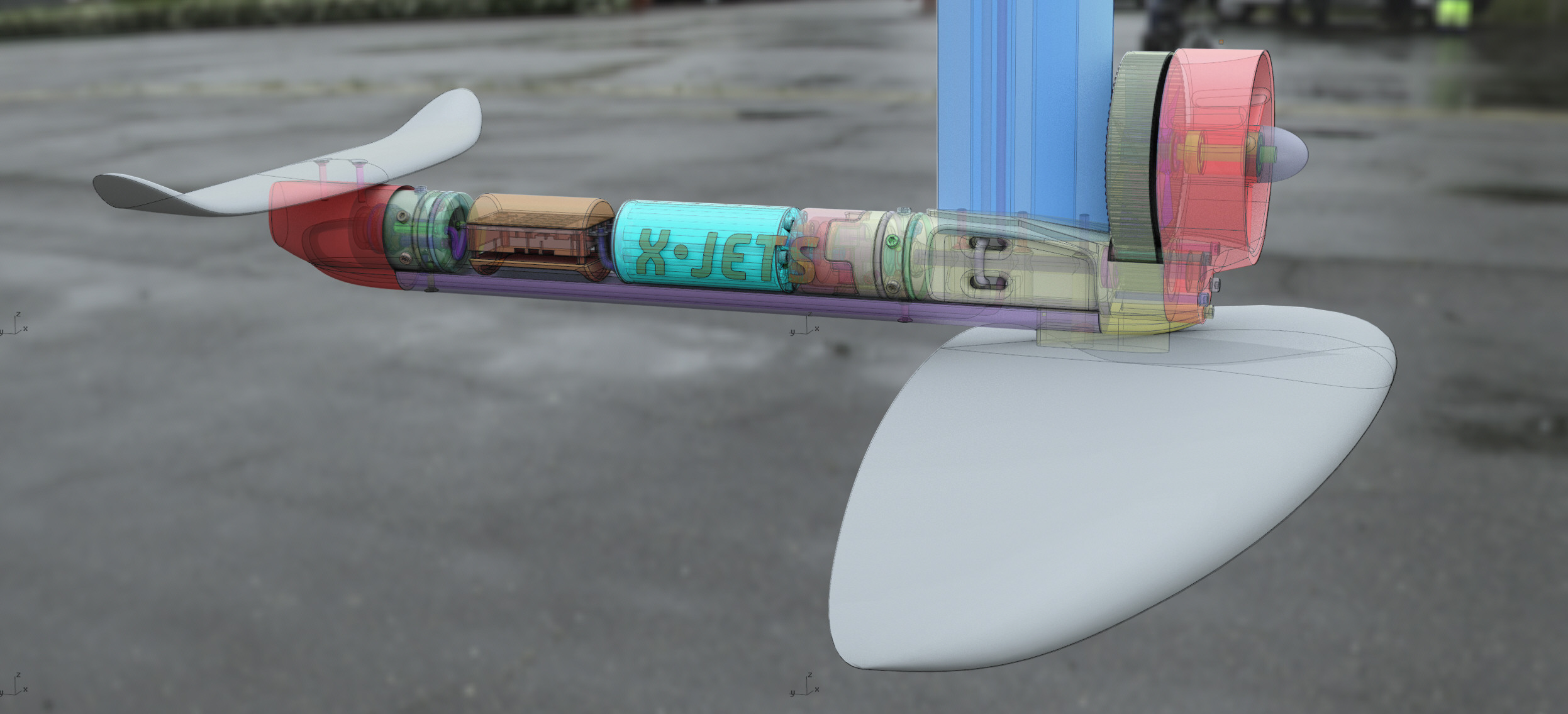
Belt reduction is now the maximum, 4:1, moving the prop to the front was a structural challenge, the solution being to route the wiring around the axle and mount the mast above the axle with that chassis linking the structures for and aft. Various solutions studied with “Scan and Solve Pro” FEA software from Intact Solutions, recommended. Additional fairing solutions to be finalized. Rear of belt can be shielded past the first proto. Thanks for all of the feedback that has helped to push forward this exploration.
6 Likes
I like how those are looking. Are you going to build any of them? I have tons of extra stuff from building eskates that I could use, so I am interested in doing a belt system in the future. I bought everything to to PMeister build this summer because I am tired of building and testing. However for the good of everyone else, a belt system would be much cheaper to implement. a good 6364 motor, belt and pulleys would be half the cost of the sss motor alone. I keep hoping someone will step up a just do a DIY package like what was done with esk8s.
My thought is that the prop pulley seems to be so much larger than what I would think necessary. Eskates use a 4 to one reduction (44 tooth and 12 tooth spur) and the pulley is no where near that large. Depends on the motor pulley size I guess. A smaller pulley would allow an even more streamlined design. I might just print out an easy design for my Slingshot foil and see how it works. Probably after I get a working board though!
Appreciate it. Yes, we are converging on the trial design, we have the initial components and have lined up the sources for most components. We’ll start cnc work after Chinese New Year based on this design. This evolution from the top of this page to the current posts reflects the incorporation of the feedback and evolution from each publication.
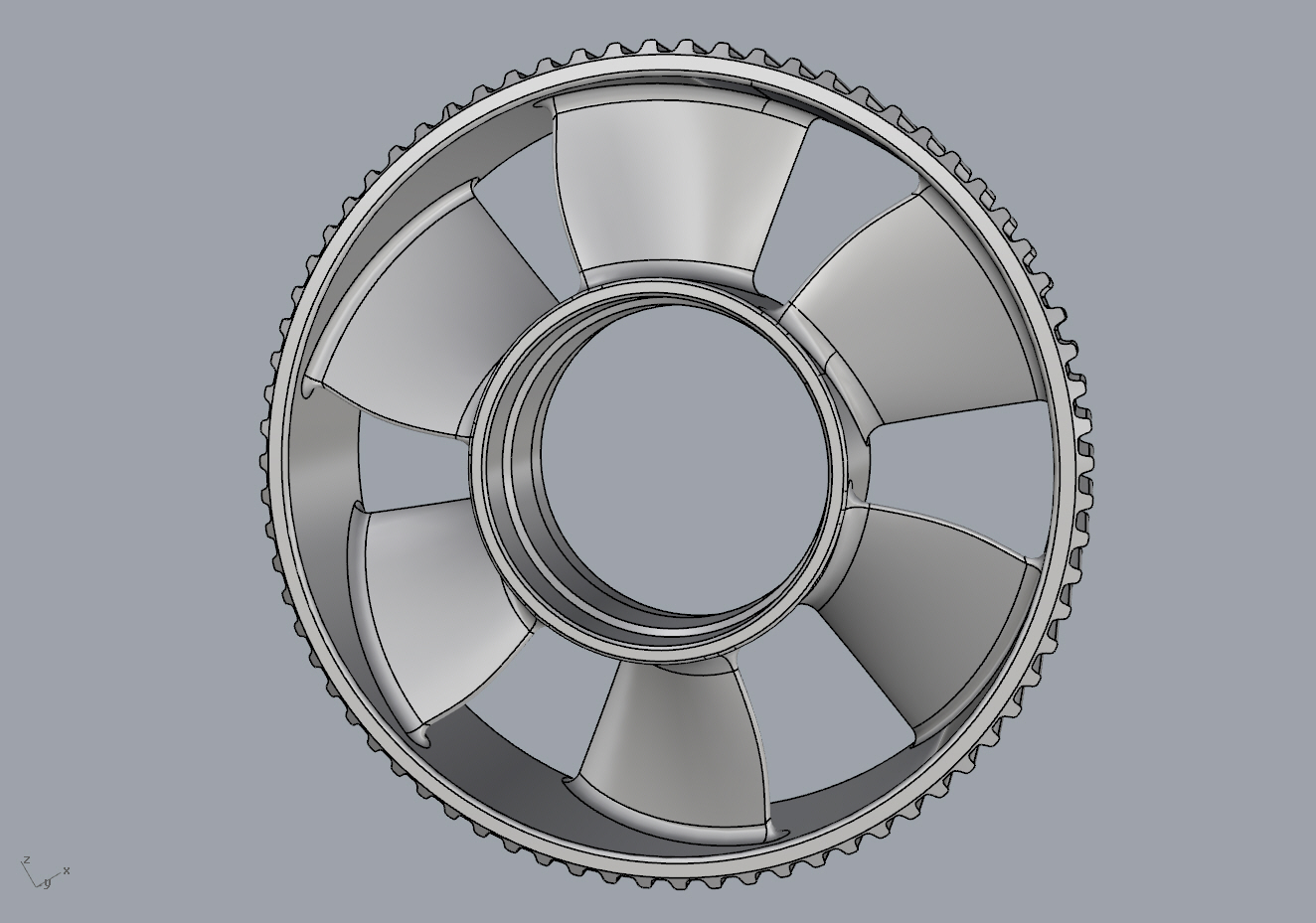
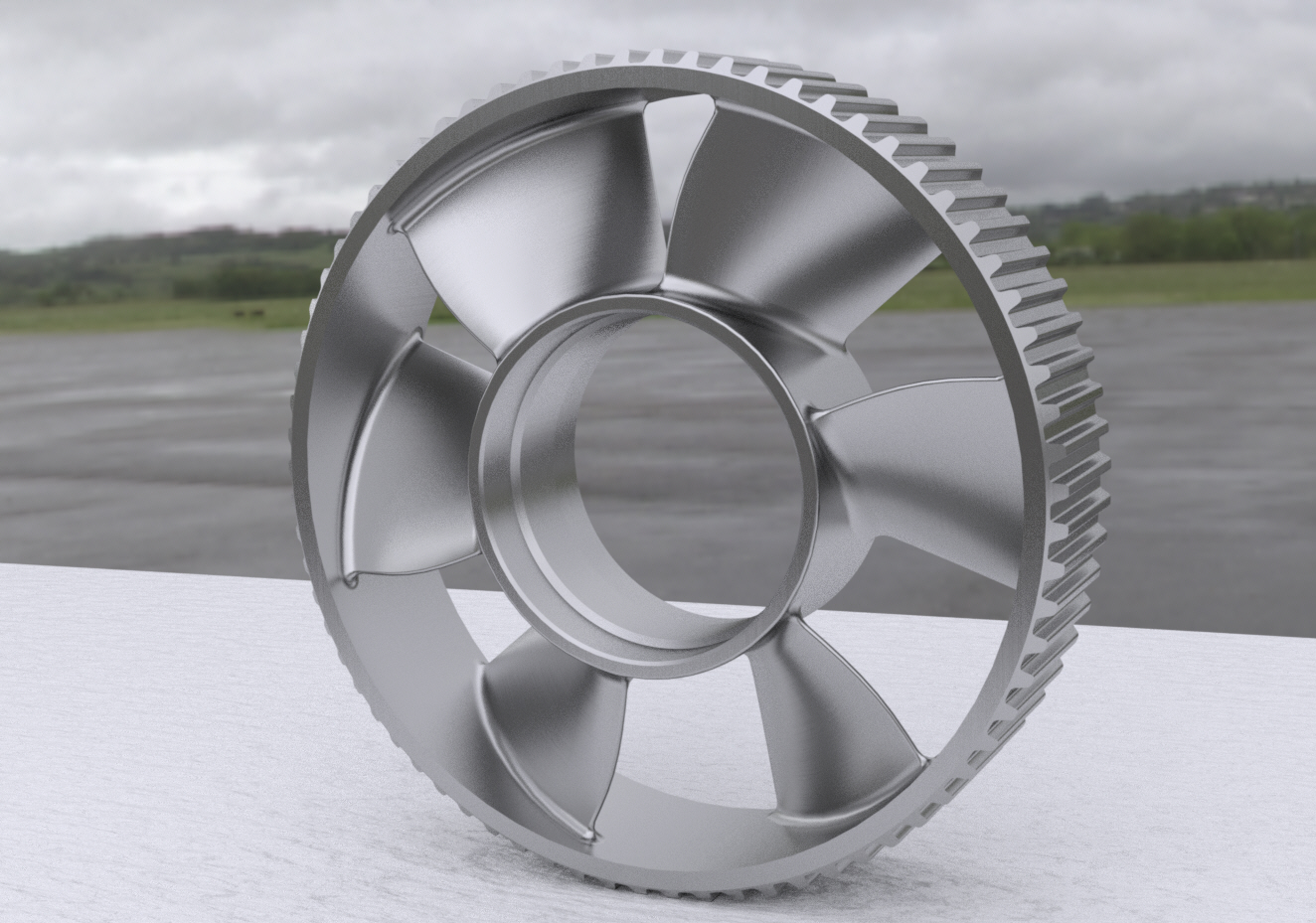
What is the tooth pitch of the belts in eskates? 5mm is the pitch that we arrived at here based on strength and meters per second allowable speed of the belt and sprockets. Working diameter was based around a target of roughly 100mm prop with the required thickness of teeth and supporting material. The small gear is 18 teeth, which has six full teeth engaged in the belt, which is recommended, and fits the 10mm drive axle. Going smaller seemed to be problematic, but did not look hard at smaller. The pulley fits easily into the “shadow” of the motor, and dropping the prop and surrounding sprocket closer drops it into the “shadow” as well. All of that factored into this choice. We’ll see the directions it needs to be modified.
for the first 30-sec I did not realize these where renders ha ha
Just a minor thing: I would make the propeller housing struts flush with the front bearing housing. That makes it a bit smoother and a tiny bit safer since there is a wider surface area in case you hit it with your face and your fingers need to reach deeper to touch the prop. Jellyfish or seaweed would also be better deflected.
I feel the belt is rather wide. It will cost some efficiency to squeeze out the water between belt and spur. This squeezing out in air is already a problem at high RPM and is greatest source of noise in a belt drive system. The wider the belt is, the greater the problem. There are belts which have helical toothing to face this problem.
They do not need any spur gear.
I do not want to be the spoilsport, but your design is the most complex and challenging one to get a prop turned i have ever seen. It might be possible to build it and maybe it works somehow, but the existing solutions are much easier to build, mount and maintain.
@PowerGlider Appreciate the input and the challenge to the approach, checking out the Silent Sync belts. At first glance they seem only available in a minimum 8mm pitch and a 640mm shortest length.
The design is complex to get around the complexity of the gearbox and to have the increased torque of reduction. Whether rational or not, the gearbox availablity, speed and power requirements cause me concern longterm. That is the thinking behind this approach. Replacement of an external belt should be easier that an internal gearbox. We’ll see.
The prop can be machined with a 3 axis approach, straight in from each face, and then the teeth, so the prototyping of different configurations will be relatively straightforward. The props can also be wax sintered for prototyping (wax injection for production) and investment cast in stainless steel with post machining. Granted it is challenging, but we have given it a good deal of thought and based on experience with investment casting think it is within the realm of possibility for the possible gains.
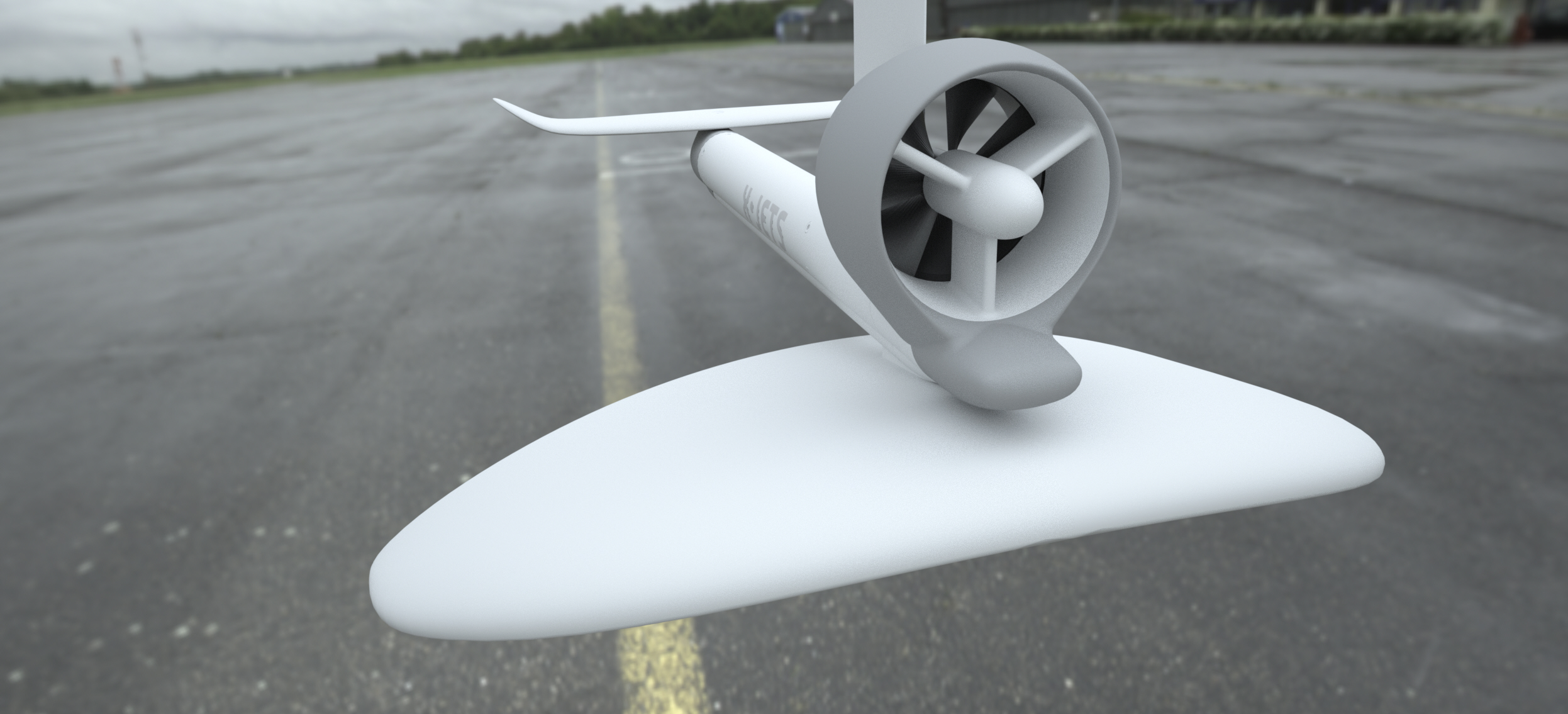
In the below images regarding the design. The central 10mm shaft anchor not shown. The Heliciel software states that in ducted impeller designs, that root losses dictate the the root diameter be at least 50%. We are using the Seabob impeller approach as a model figuring that they have thrown a ton of research and trial and error to arrive at the current state. The impeller study will be the major effort once the other structures are locked in. There is a sufficient envelope for experiments.
*update: When design near final looking at forged (compression molded) carbon technology for the rim drive prop, inspired by Jetsurf.

Width of the belt is 25mm in the design, the maximum, which can be reduced after real world experimentation.
Now i am confused. The propeller you draw has 100mm diameter? You want to have 1:4 reduction gear?
Now you added a large hub, increasing drag, additionally to the tube with motor and additionally to the drag of the belt drive. Is this really necessary? Because if we look at pictures of tug boats, the hub is never that large. It might be correct for air props but maybe not for water props?
Maybe the jet approach is not correct if you do not speed up the water in front of the prop by the shroud and you only have small pressure increase behind the prop?
100mm is rather small and people are experimenting with direct driven inrunner jet style a lot here with diameters ranging from 56 to 80mm, sometimes even larger.
I wonder how you want to make the big difference to those direct drive inrunners if you need such a lot of components adding so much drag?
If you can accept all this drag and you have concerns about the power, why not go for a larger inrunner?
I use different approach with outrunner, Direct drive outrunner with direct water cooling - Propulsion System (Motor, Gears) - FOIL.zone
maybe you want to add some sceptic comments there in exchange ![]()
Hi! I’ve used a lot of belts and I strongly recommend you use eagle/silentsync. The best thing about them is that the stat in place by them self, no need for walls on sprockets. Htd-belts will move when rotating, creating friction, heat and noice. A 25mm wide htd can be replaced by a 16mm silentsync. 16mm is good for 10kw+
why not incorporate the duct into the mast and then you could do away with the struts that are needed to support it or at least reduce them.
I think people worry way to much about the safety of the prop I think there are far more risks attributed to being hit by a mast or wing at speed than the prop witch if powered down when you fall is no issue
If I don’t find a gear thats available soon, I might do something similar. Did you consider using a chain too?
Briefly considered a chain, but every factor, from tooth pitch to thickness profile, rpm, noise, wear, etc. all made the choice of a belt immediate. A 5mm tooth pitch belt has a thickness of under 4 millimeters, that was the biggest driving factor.
you can get some fairly small chains(thinking the cam chain on a small motorbike) it maybe worth re considering as there is something like a 30% decrease in efficiency with belts over chain
Both belts and chains operate at about 98% efficiency, if a chain is 30% more efficient then the factor is 30% of 1%, this small gain does not offset, in my estimation, the mechanical complexity, weight, need for lubrication, requirement that all chain components be 316 stainless steel, wear on a impeller rim that could be plastic, carbon, or alloy from said chain, etc.
Smallest pitch chain available appears at first search to be 6.35mm with a height of 5.9mm quite a thickeness increase in the drag profile,
I feel good about the belt choice for the intitial trials.
1 Like
Hi, x-jets, because you live in China, it is obvious that you can easily find a company that produces a propeller made of high-quality aluminum in your country. I would create a propeller in 3D CAD and the company can immediately start producing high quality and cheap propellers for all e-foils in the world.
I will increase the efficiency of your propeller for that. Your propeller has several significant hydrodynamic errors - the wrong shape of the blades and the hub.
What do you say, will you help find such a company?
2 Likes